2018 Vol. 11, No. 5
2018, 11(5): 695-710.
doi: 10.3788/CO.20181105.0695
 Abstract
Abstract FullText HTML
FullText HTML PDF 1539KB
PDF 1539KB
Abstract:
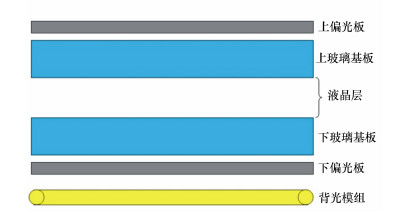
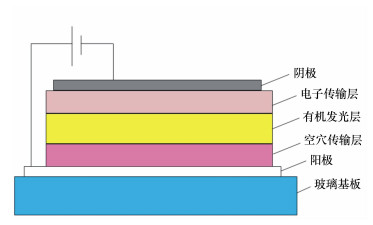
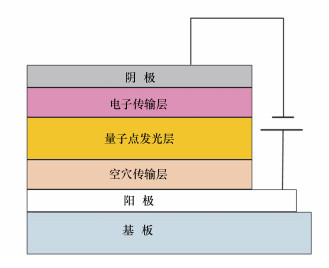
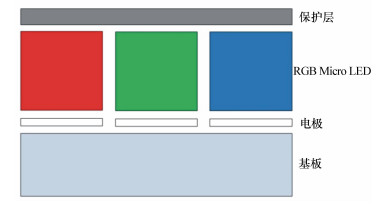
Flat panel display has been widely used in electronic instrument display, car display, digital camera, smart phone, personal computer, TV products, etc. due to its small size, light weight, low power consumption and good picture quality. In this paper, we introduce the structure and principle of thin film transistor-liquid crystal display (TFT-LCD), organic light emitting diode (OLED) display, quantum dot light emitting diode (QLED) display and micro light-emitting diode (Micro-LED). These flat panel display technologies are compared in terms of structure, material, performance and application. Finally, the latest research progress of these kinds of flat panel display technologies is given. After years of development, LCD display still has a dominant position in the display market due to its maturity and low cost. OLED display technology has got rid of the backlight of traditional LCD, and has opened up the future development direction of self-luminous display. For a considerable period of time, LCDs and OLEDs will still coexist in the market, competing and complementing each other. QLED display and Micro-LED display, in theory, QLED display and Micro-LED display have better color performance and longer working life than OLED display, and have very broad development prospects, which will provide more and better choices for the future display industry.
Flat panel display has been widely used in electronic instrument display, car display, digital camera, smart phone, personal computer, TV products, etc. due to its small size, light weight, low power consumption and good picture quality. In this paper, we introduce the structure and principle of thin film transistor-liquid crystal display (TFT-LCD), organic light emitting diode (OLED) display, quantum dot light emitting diode (QLED) display and micro light-emitting diode (Micro-LED). These flat panel display technologies are compared in terms of structure, material, performance and application. Finally, the latest research progress of these kinds of flat panel display technologies is given. After years of development, LCD display still has a dominant position in the display market due to its maturity and low cost. OLED display technology has got rid of the backlight of traditional LCD, and has opened up the future development direction of self-luminous display. For a considerable period of time, LCDs and OLEDs will still coexist in the market, competing and complementing each other. QLED display and Micro-LED display, in theory, QLED display and Micro-LED display have better color performance and longer working life than OLED display, and have very broad development prospects, which will provide more and better choices for the future display industry.
2018, 11(5): 711-727.
doi: 10.3788/CO.20181105.0711
Abstract:
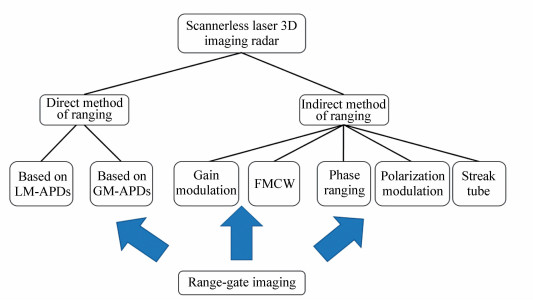
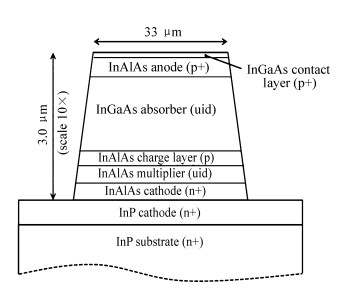
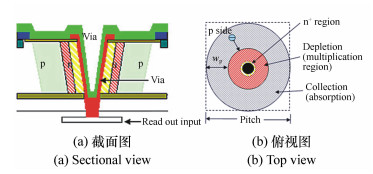
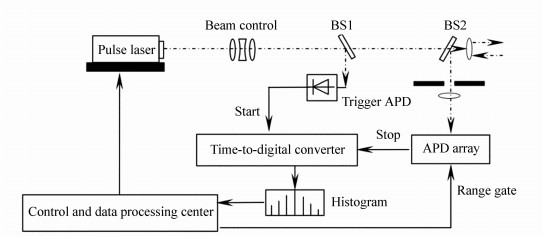
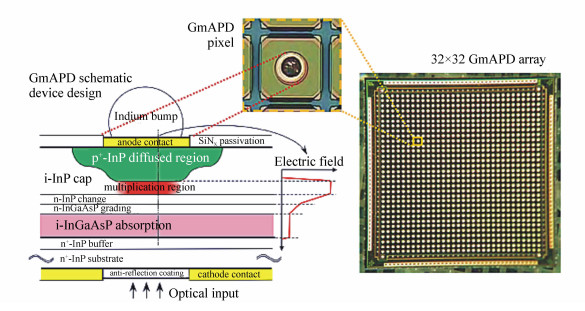
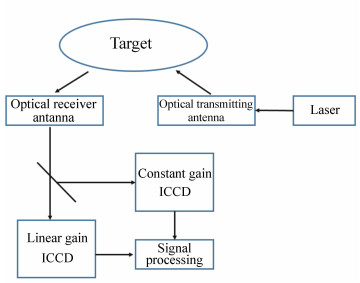
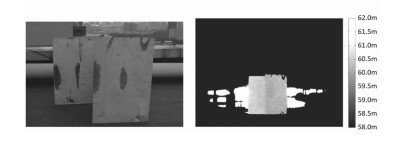
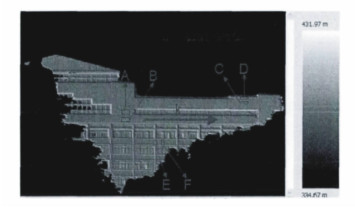
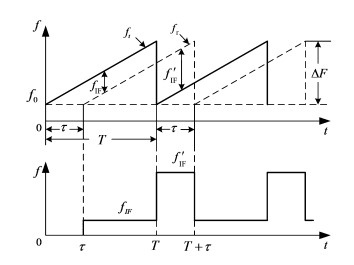
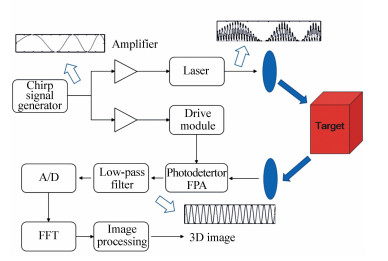
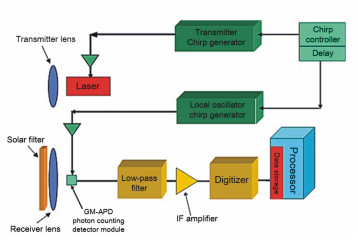
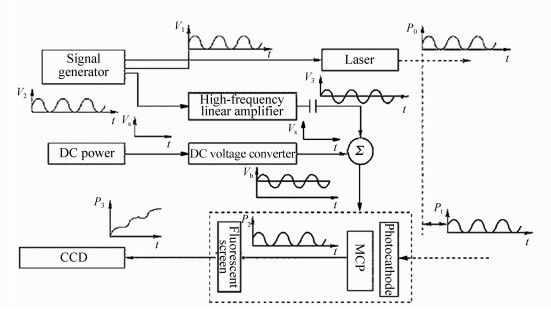
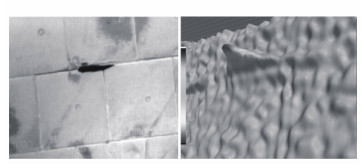
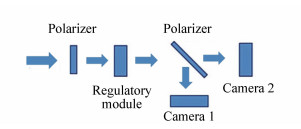
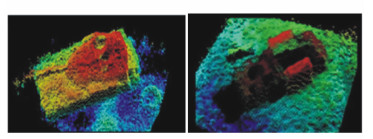
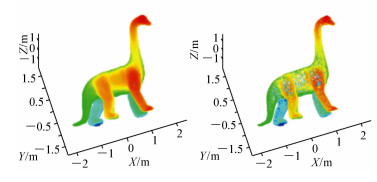
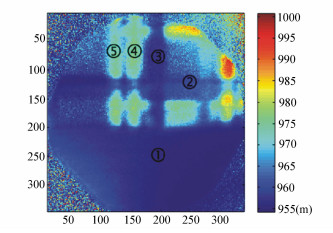
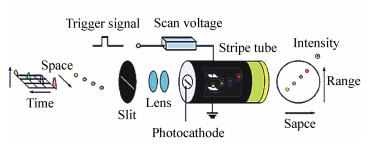
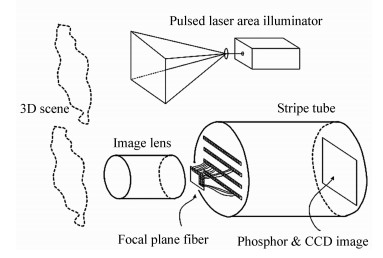
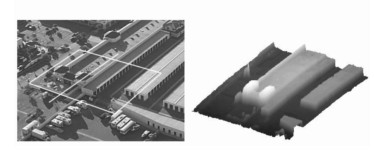
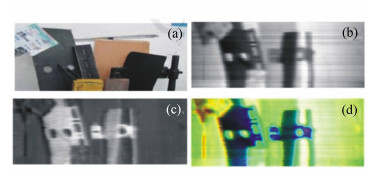
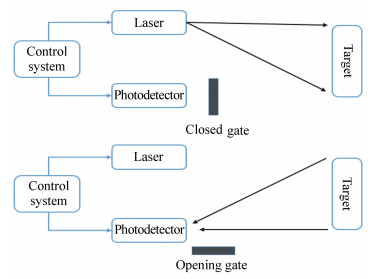
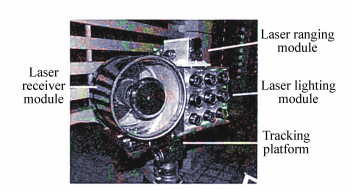
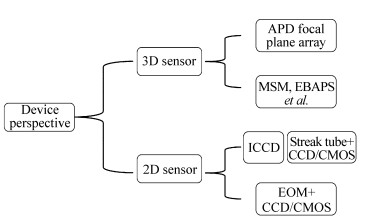
The non-scanning laser 3D imaging radar has the advantages of small size, light weight, high resolution, high precision and distortion-free imaging of dynamic targets, and has become the focus and hotspot of research in many countries. In this paper, we describe the basic principles of seven kinds of non-scanning laser three-dimensional imaging radar systems and distance gated imaging technology, such as flash, photon counting and gain modulation. The progress of the research is traced and summarized, and the technical advantages and disadvantages of each system are compared and analyzed. The trend is analyzed from the perspective of core devices. The results show that the method of using 2D sensor to convert time information on the optical level to realize 3D imaging has the characteristics of high resolution, high energy utilization and high signal-to-noise ratio, and has outstanding advantages and application prospects in aerospace, surveying and mapping, military and civil fields.
The non-scanning laser 3D imaging radar has the advantages of small size, light weight, high resolution, high precision and distortion-free imaging of dynamic targets, and has become the focus and hotspot of research in many countries. In this paper, we describe the basic principles of seven kinds of non-scanning laser three-dimensional imaging radar systems and distance gated imaging technology, such as flash, photon counting and gain modulation. The progress of the research is traced and summarized, and the technical advantages and disadvantages of each system are compared and analyzed. The trend is analyzed from the perspective of core devices. The results show that the method of using 2D sensor to convert time information on the optical level to realize 3D imaging has the characteristics of high resolution, high energy utilization and high signal-to-noise ratio, and has outstanding advantages and application prospects in aerospace, surveying and mapping, military and civil fields.
2018, 11(5): 728-735.
doi: 10.3788/CO.20181105.0728
Abstract:
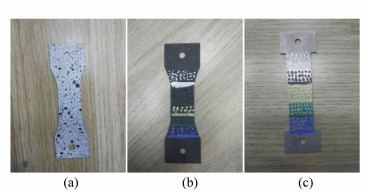
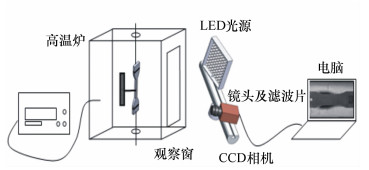
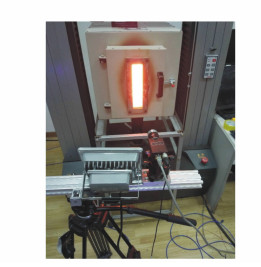
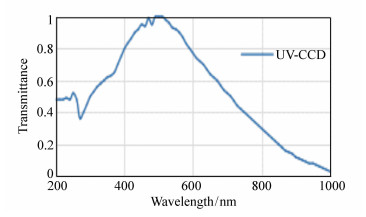
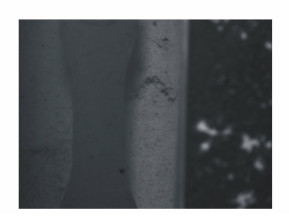
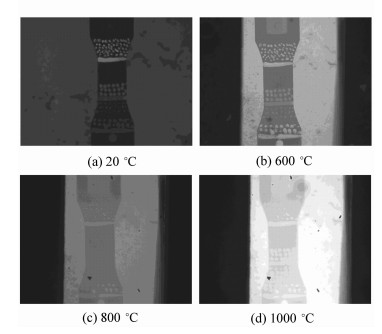
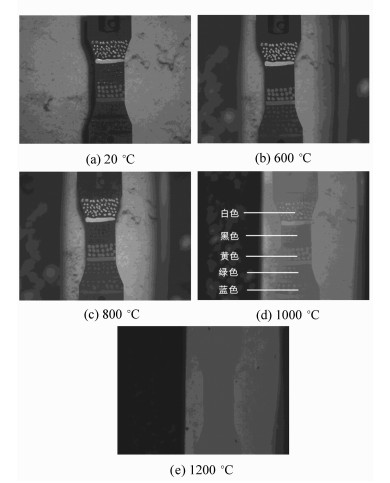
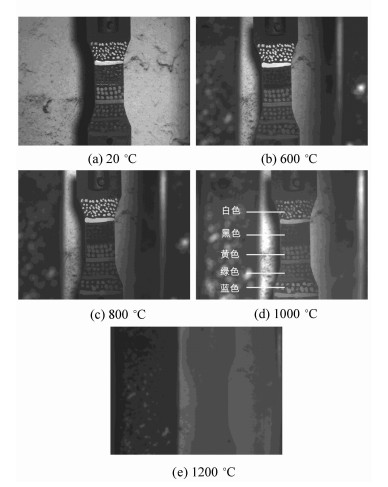
In order to measure the mechanical properties of materials at high temperatures or even at ultra-high temperatures, digital image correlation methods are used and their optimal imaging at high temperatures is studied. Different speckle production methods are adopted and high temperature paints of different colors are added. At different temperature nodes, different light sources and corresponding filters are added to collect and observe whether the image has a good contrast. The ordinary monochromatic light source will gradually fail after 800℃, and the image cannot be obtained. The ultraviolet light can still obtain a better image at 1 200℃, and the color of the test piece itself is better as the background color. UV light illumination can be used to measure DIC in high temperature environment. At the same time, the use of black or blue speckle directly sprayed on the test piece has the best contrast, which is superior to the conventional speckle making method.
In order to measure the mechanical properties of materials at high temperatures or even at ultra-high temperatures, digital image correlation methods are used and their optimal imaging at high temperatures is studied. Different speckle production methods are adopted and high temperature paints of different colors are added. At different temperature nodes, different light sources and corresponding filters are added to collect and observe whether the image has a good contrast. The ordinary monochromatic light source will gradually fail after 800℃, and the image cannot be obtained. The ultraviolet light can still obtain a better image at 1 200℃, and the color of the test piece itself is better as the background color. UV light illumination can be used to measure DIC in high temperature environment. At the same time, the use of black or blue speckle directly sprayed on the test piece has the best contrast, which is superior to the conventional speckle making method.




2018, 11(5): 736-744.
doi: 10.3788/CO.20181105.0736
Abstract:
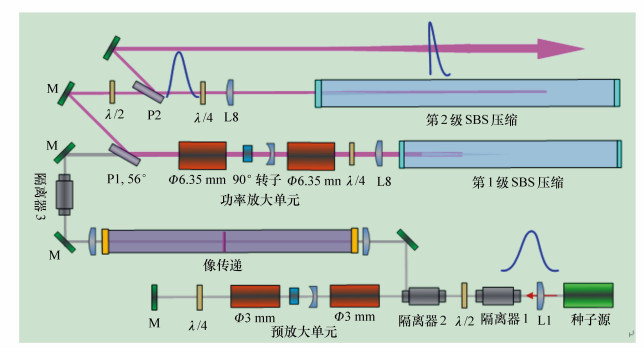
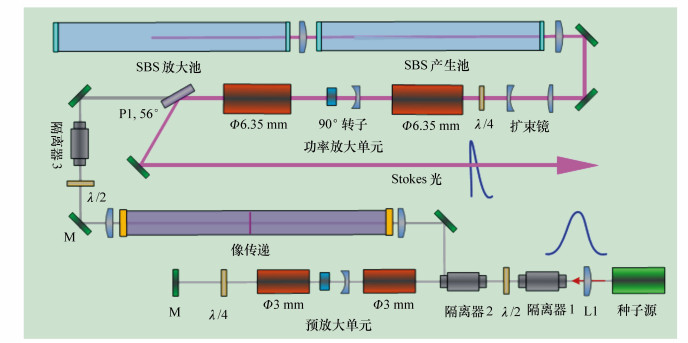
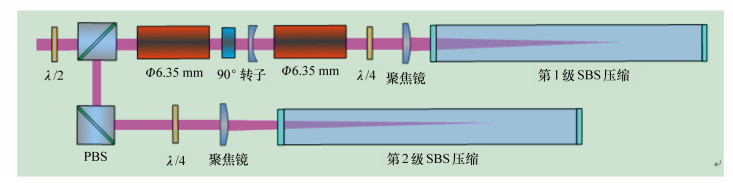
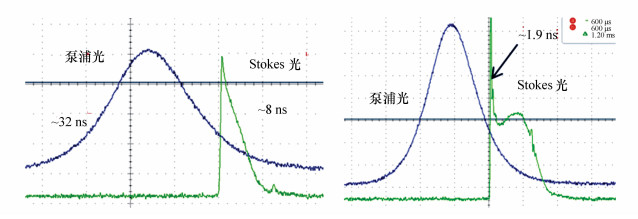
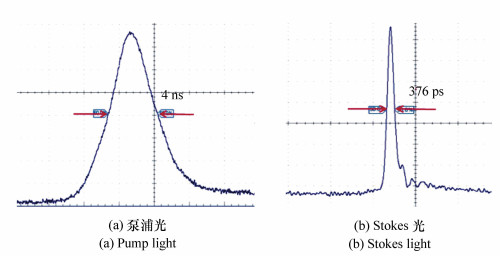
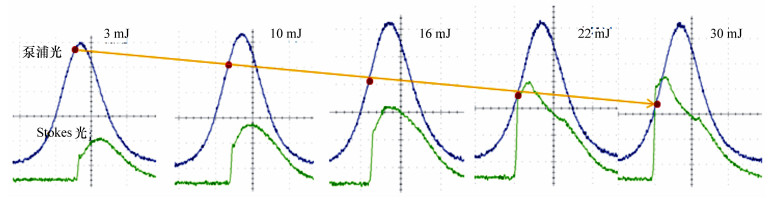
Stimulated Brillouin scattering (SBS) pulse width compression is one of the important pathway to achieve high peak power and short pulse output. However, the current SBS pulse with compression is limited to 1~10 Hz low repetition frequency lasers, which limits the application of high repetition frequency short pulse lasers in the fields of laser radar, space debris detection, target imaging. Therefore, the experimental study of SBS pulse width compression at high repetition frequency is carried out. The main oscillation amplification laser with high repetition frequency is designed and the SBS secondary cascade pulse width compression and SBS oscillation amplification double pool pulse width compression experiments are carried out. Through SBS secondary cascade compression, the pulse width is compressed from ~32 ns to ~1.9 ns, and the pulse width compression ratio is up to 16 times. The SBS oscillation amplification double-cell structure realizes the pulse width from ~4 ns to 376 ps, and the pulse width compression ratio is up to 10 times. The experimental results show that no optical breakdown occurred in case of the ultra-clean closed SBS phase conjugation mirror when the output power of Stokes light reaches 50mJ, thus achieving SBS pulse width compression at a high repetition rate of 200 Hz.
Stimulated Brillouin scattering (SBS) pulse width compression is one of the important pathway to achieve high peak power and short pulse output. However, the current SBS pulse with compression is limited to 1~10 Hz low repetition frequency lasers, which limits the application of high repetition frequency short pulse lasers in the fields of laser radar, space debris detection, target imaging. Therefore, the experimental study of SBS pulse width compression at high repetition frequency is carried out. The main oscillation amplification laser with high repetition frequency is designed and the SBS secondary cascade pulse width compression and SBS oscillation amplification double pool pulse width compression experiments are carried out. Through SBS secondary cascade compression, the pulse width is compressed from ~32 ns to ~1.9 ns, and the pulse width compression ratio is up to 16 times. The SBS oscillation amplification double-cell structure realizes the pulse width from ~4 ns to 376 ps, and the pulse width compression ratio is up to 10 times. The experimental results show that no optical breakdown occurred in case of the ultra-clean closed SBS phase conjugation mirror when the output power of Stokes light reaches 50mJ, thus achieving SBS pulse width compression at a high repetition rate of 200 Hz.

2018, 11(5): 745-764.
doi: 10.3788/CO.20181105.0745
Abstract:
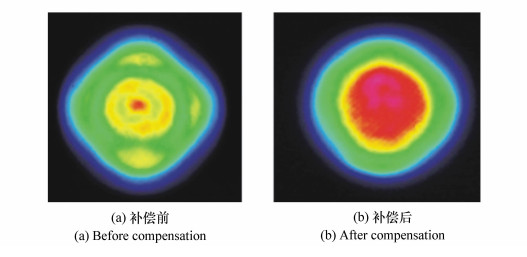
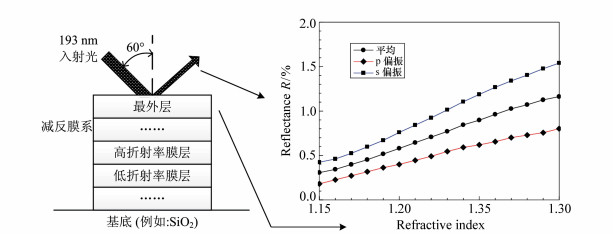
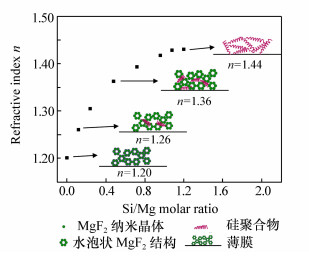
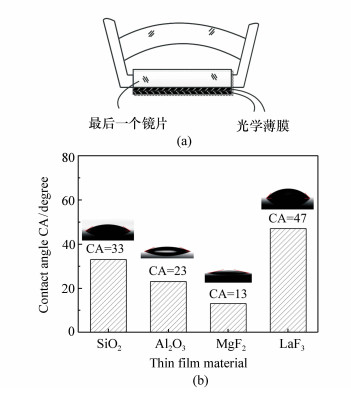
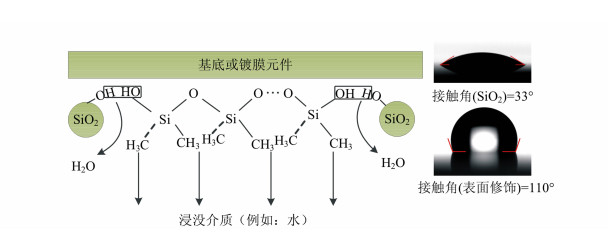
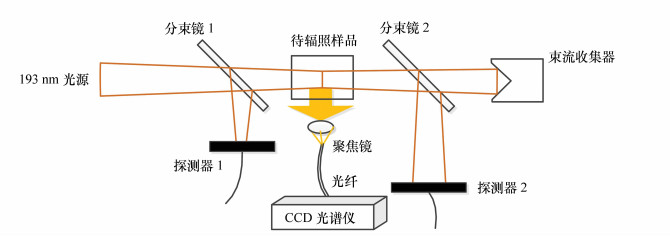
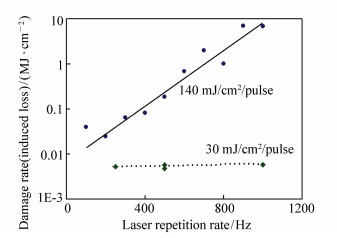
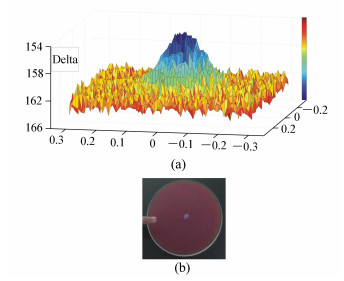
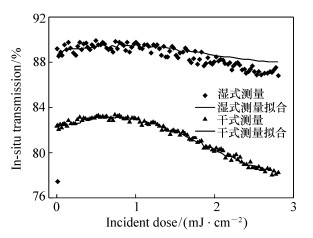
The deep ultraviolet lithography is currently a main method for integrated circuit manufacture. The immersive projection objective must be used to increase resolution of the optical system for realization of smaller component feature dimensions. Therefore a number of rigorous requirements for optical coating component are put forward. In this paper we present designs of the film material and film system applicable to immersive lithographical system as well as the large angle polarization-maintaining film system required for optical systems at high NA. Key issues about immersion environment adaptability, hydrophobicity and anti-contamination of the immersion coating most critical to the objective are discussed. Laser irradiation lifetime of the coated components especially in the immersion environment that is an important factor to evaluate performance of the immersive lithographical system is analyzed.
The deep ultraviolet lithography is currently a main method for integrated circuit manufacture. The immersive projection objective must be used to increase resolution of the optical system for realization of smaller component feature dimensions. Therefore a number of rigorous requirements for optical coating component are put forward. In this paper we present designs of the film material and film system applicable to immersive lithographical system as well as the large angle polarization-maintaining film system required for optical systems at high NA. Key issues about immersion environment adaptability, hydrophobicity and anti-contamination of the immersion coating most critical to the objective are discussed. Laser irradiation lifetime of the coated components especially in the immersion environment that is an important factor to evaluate performance of the immersive lithographical system is analyzed.
2018, 11(5): 765-772.
doi: 10.3788/CO.20181105.0765
Abstract:
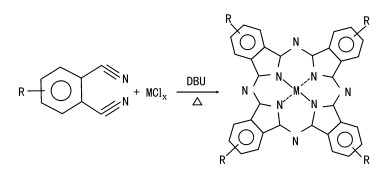
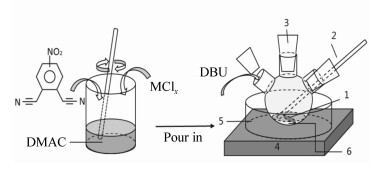
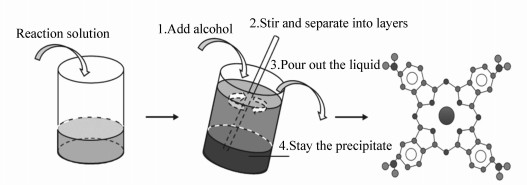
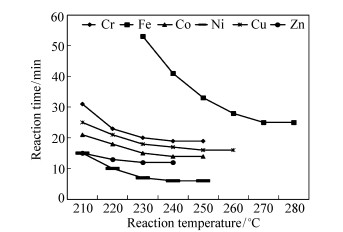
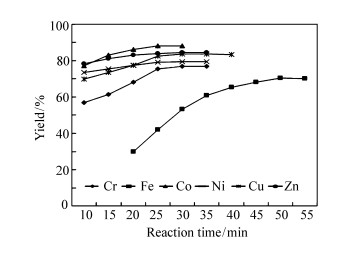
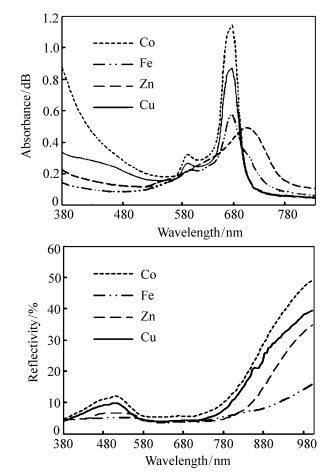
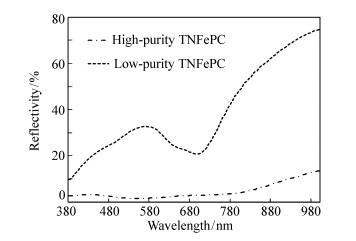
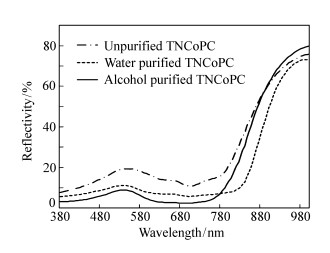
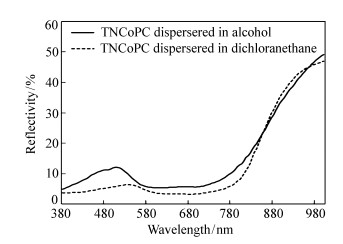
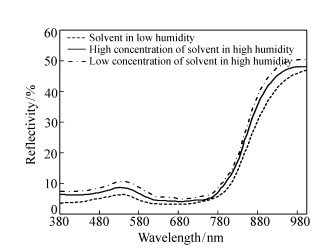
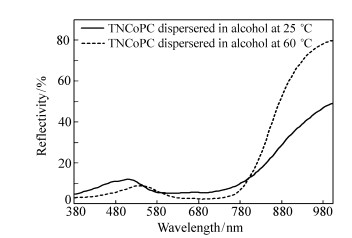
In order to effectively resist the threat of hyperspectral imaging and reconnaissance and achieve "the same spectrum and color" of camouflage paint and plants, based on the similarity between phthalocyanine and chlorophyll porphyrin structure, the synthesis of phthalocyanine compounds and the fitting of plant spectral features are carried out. The planar phthalocyanine structure of the electron-withdrawing substituent and the divalent transition center ion is constructed. The phthalocyanine compounds are synthesized by DBU catalysis and self-made synthesis equipment. The optimal synthesis conditions and purification methods are investigated. The absorption and reflectance spectra of the products are tested by spectrophotometer to study the influence of central ion and aggregation on the spectral properties of phthalocyanine compounds. The experimental results show that the reaction time of tetranitrometal phthalocyanine is the shortest at 240~250℃ under the action of catalyst; cobalt phthalocyanine has a sharper absorption peak than the phthalocyanine product formed by iron, zinc, copper and other centrally substituted ions, which is more similar to the green plant spectral curve; the spectral reflection curve of the phthalocyanine compound shifts with the influence of temperature, purity and dispersion state on the product aggregation state. The absorption spectrum of tetra-nitro cobalt phthalocyanine synthesized at 220~240℃ for 20~30 min are in agreement with the Q band absorption characteristics of phthalocyanine compounds, and its peak wavelengths are matched with the plant spectrum. It provides new methods and new approaches for the application of phthalocyanine pigments in the fields of military, textile, dye and bionic etc.
In order to effectively resist the threat of hyperspectral imaging and reconnaissance and achieve "the same spectrum and color" of camouflage paint and plants, based on the similarity between phthalocyanine and chlorophyll porphyrin structure, the synthesis of phthalocyanine compounds and the fitting of plant spectral features are carried out. The planar phthalocyanine structure of the electron-withdrawing substituent and the divalent transition center ion is constructed. The phthalocyanine compounds are synthesized by DBU catalysis and self-made synthesis equipment. The optimal synthesis conditions and purification methods are investigated. The absorption and reflectance spectra of the products are tested by spectrophotometer to study the influence of central ion and aggregation on the spectral properties of phthalocyanine compounds. The experimental results show that the reaction time of tetranitrometal phthalocyanine is the shortest at 240~250℃ under the action of catalyst; cobalt phthalocyanine has a sharper absorption peak than the phthalocyanine product formed by iron, zinc, copper and other centrally substituted ions, which is more similar to the green plant spectral curve; the spectral reflection curve of the phthalocyanine compound shifts with the influence of temperature, purity and dispersion state on the product aggregation state. The absorption spectrum of tetra-nitro cobalt phthalocyanine synthesized at 220~240℃ for 20~30 min are in agreement with the Q band absorption characteristics of phthalocyanine compounds, and its peak wavelengths are matched with the plant spectrum. It provides new methods and new approaches for the application of phthalocyanine pigments in the fields of military, textile, dye and bionic etc.
2018, 11(5): 773-778.
doi: 10.3788/CO.20181105.0773
Abstract:
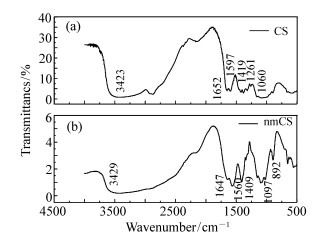
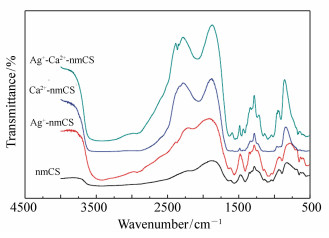
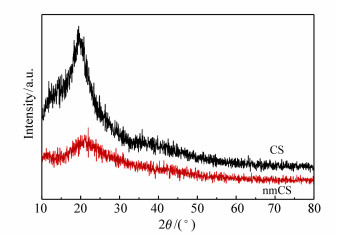
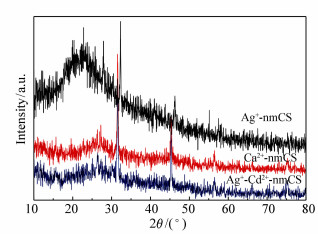
In order to improve the water soluble and the hemostatic performance of chitosan (CS), chitosan is nano-sized and an antibacterial Ag+ and coagulation-assisted Ca2+ are introduced to prepare a nano-chitosan metal ion composite hemostatic material. Firstly, nano-chitosan (nmCS) is prepared by ion exchange method, and AgNO3 and saturated CaCl2 solution are added respectively to obtain nmCS-Ag, nmCS-Ca and nmCS-Ag-Ca composites. Then, the structure of the composite is characterized by means of FTIR, XRD and SEM. Finally, the coagulation and hemostatic properties of the complex are tested. The results show that the characteristic absorption peak of nano-chitosan sodium salt appeared at the modified chitosan IR spectrum at 1 647 cm-1 and 1 560 cm-1. The nano-chitosan composited with metal ions show the crystal characteristics of Ag+ and Ca2+ in the XRD pattern. The SEM shows that partial Ag+ precipitates in nmCS-Ag, and the composite effect of nmCS-Ca is better. The coagulation and hemostasis of nmCS-Ag-Ca is better than that of nmCS-Ag and nmCS-Ca, while the coagulation and hemostasis of nmCS-Ag and nmCS-Ca are better than that of nmCS. The test results show that the nano-chitosan metal ion composite hemostatic material has been successfully prepared.
In order to improve the water soluble and the hemostatic performance of chitosan (CS), chitosan is nano-sized and an antibacterial Ag+ and coagulation-assisted Ca2+ are introduced to prepare a nano-chitosan metal ion composite hemostatic material. Firstly, nano-chitosan (nmCS) is prepared by ion exchange method, and AgNO3 and saturated CaCl2 solution are added respectively to obtain nmCS-Ag, nmCS-Ca and nmCS-Ag-Ca composites. Then, the structure of the composite is characterized by means of FTIR, XRD and SEM. Finally, the coagulation and hemostatic properties of the complex are tested. The results show that the characteristic absorption peak of nano-chitosan sodium salt appeared at the modified chitosan IR spectrum at 1 647 cm-1 and 1 560 cm-1. The nano-chitosan composited with metal ions show the crystal characteristics of Ag+ and Ca2+ in the XRD pattern. The SEM shows that partial Ag+ precipitates in nmCS-Ag, and the composite effect of nmCS-Ca is better. The coagulation and hemostasis of nmCS-Ag-Ca is better than that of nmCS-Ag and nmCS-Ca, while the coagulation and hemostasis of nmCS-Ag and nmCS-Ca are better than that of nmCS. The test results show that the nano-chitosan metal ion composite hemostatic material has been successfully prepared.

2018, 11(5): 779-789.
doi: 10.3788/CO.20181105.0779
Abstract:
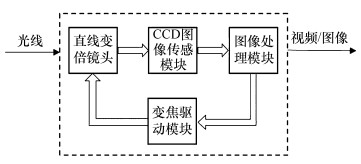
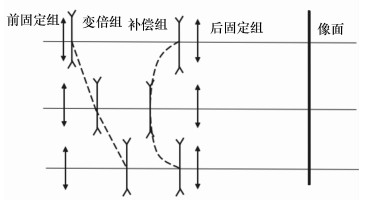
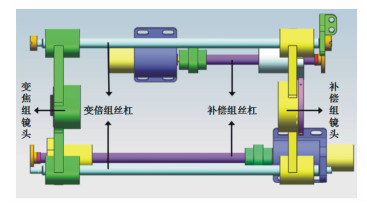
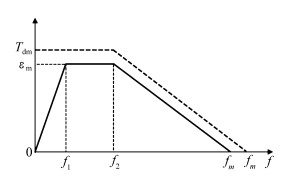
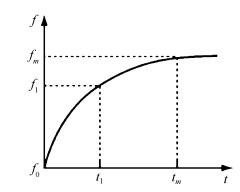
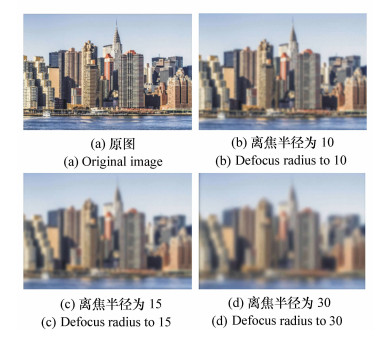
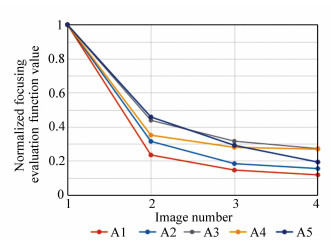
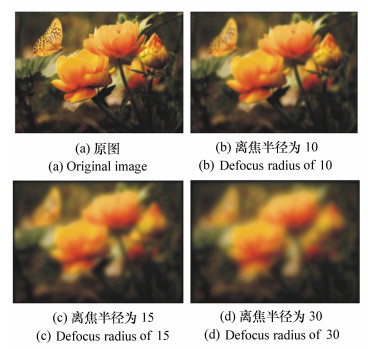
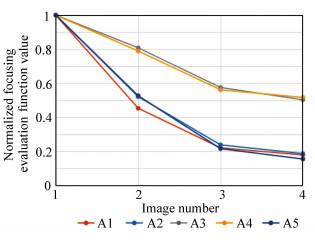
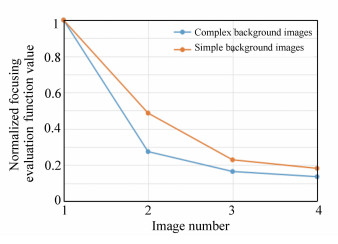
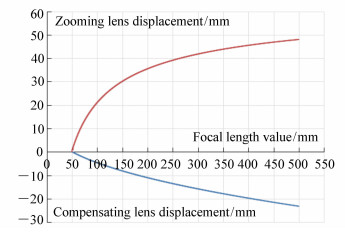
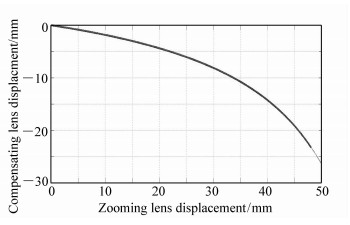
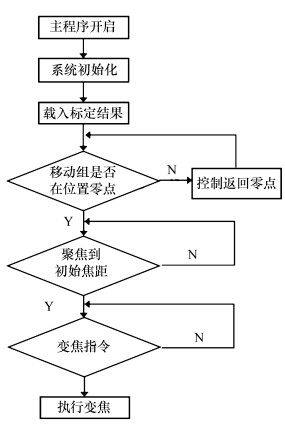
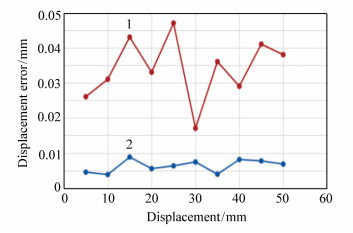
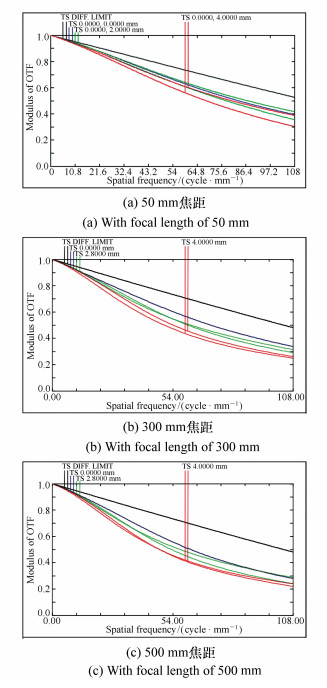
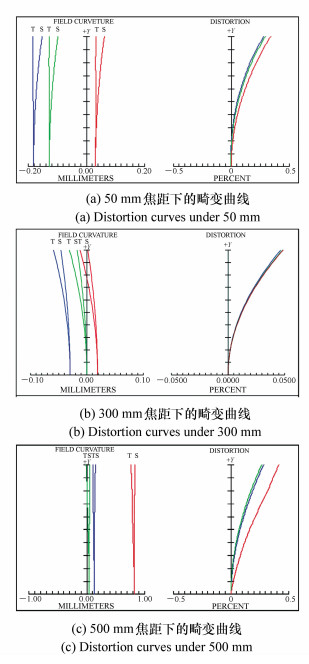
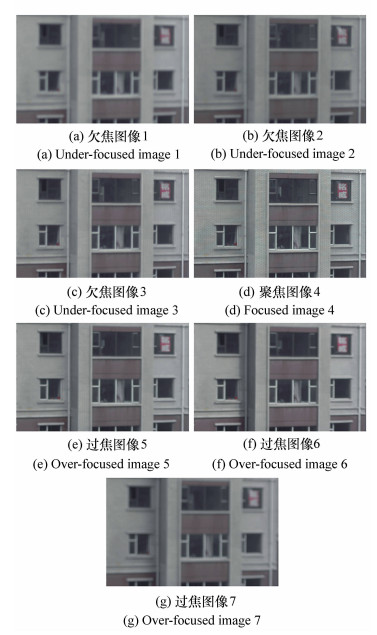
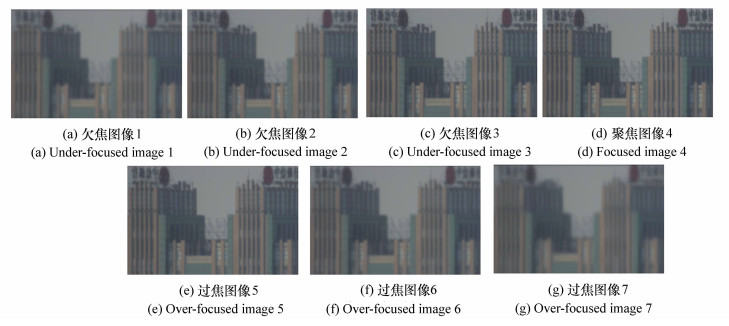
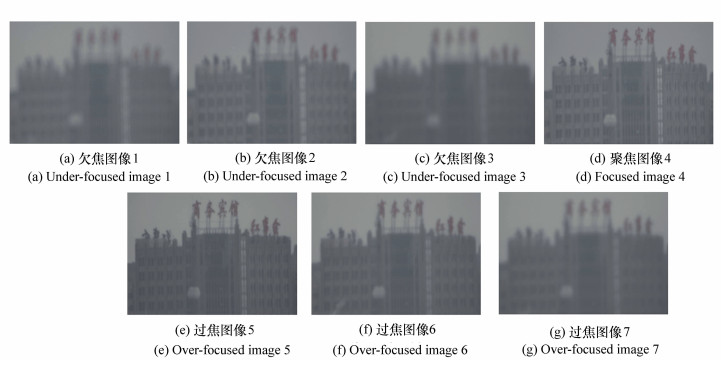
In order to meet the volume and weight requirements of the unmanned aerial vehide's (UAV) photoelectric payload, and effectively solve the problem of the high requirement of processing precision of traditional cam mechanism, and the problem that the system is prone to mechanical oscillation and improve the response speed and zoom accuracy of the system, a continuous zooming imaging system based on stepping motor drive is studied. The zoom focus function of the mechanically compensated zoom system is realized by a two-phase hybrid stepping motor drive. First of all, the working principle and composition of continuous zooming imaging system based on stepping motor are investigated. The hardware platform is built, and the acceleration and deceleration process of stepping motor is controlled by single-chip. Then, the image sharpness evaluation function suitable for the system is constructed, and the scan focus search algorithm is used to complete the calibration of the focal length value of the lens, and the calibration result is loaded into the focus algorithm. Finally, the performance test of the system is performed. The test results show that by using the velocity control model, the relative error of the stepping motor displacement decreased significantly, which is below 0.010 mm, and the zooming accuracy of the whole system is far less than 1%, and the optical performance and field shooting performance are improved. The continuous zooming imaging system based on the stepping motor satisfies the applicability requirements of the photoelectric load of the UAV.
In order to meet the volume and weight requirements of the unmanned aerial vehide's (UAV) photoelectric payload, and effectively solve the problem of the high requirement of processing precision of traditional cam mechanism, and the problem that the system is prone to mechanical oscillation and improve the response speed and zoom accuracy of the system, a continuous zooming imaging system based on stepping motor drive is studied. The zoom focus function of the mechanically compensated zoom system is realized by a two-phase hybrid stepping motor drive. First of all, the working principle and composition of continuous zooming imaging system based on stepping motor are investigated. The hardware platform is built, and the acceleration and deceleration process of stepping motor is controlled by single-chip. Then, the image sharpness evaluation function suitable for the system is constructed, and the scan focus search algorithm is used to complete the calibration of the focal length value of the lens, and the calibration result is loaded into the focus algorithm. Finally, the performance test of the system is performed. The test results show that by using the velocity control model, the relative error of the stepping motor displacement decreased significantly, which is below 0.010 mm, and the zooming accuracy of the whole system is far less than 1%, and the optical performance and field shooting performance are improved. The continuous zooming imaging system based on the stepping motor satisfies the applicability requirements of the photoelectric load of the UAV.
2018, 11(5): 790-797.
doi: 10.3788/CO.20181105.0790
Abstract:
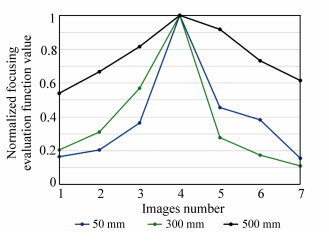
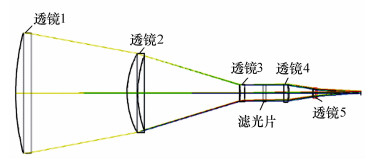
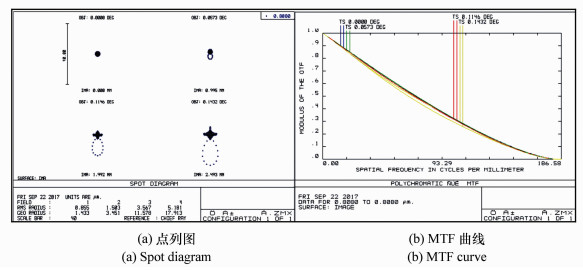
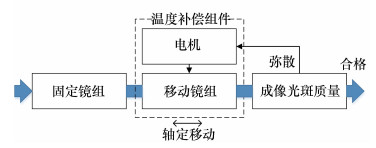
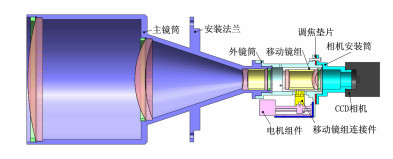
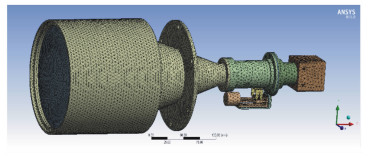
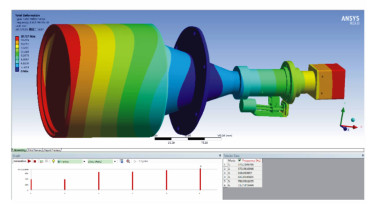
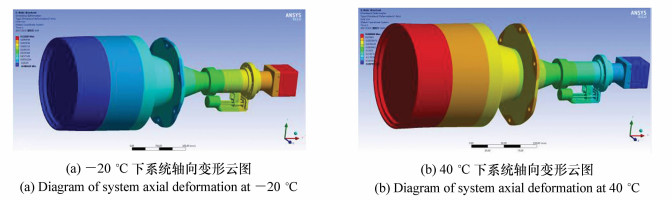
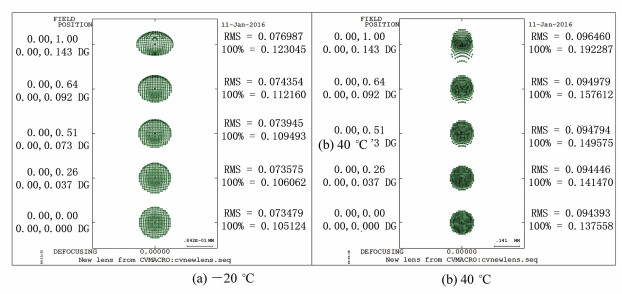
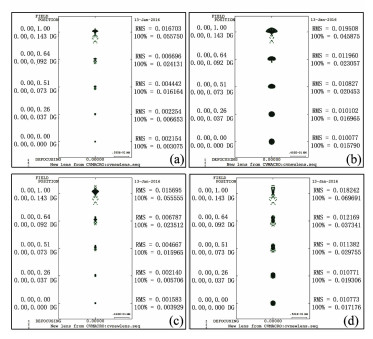
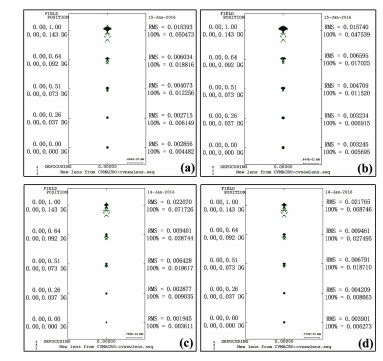
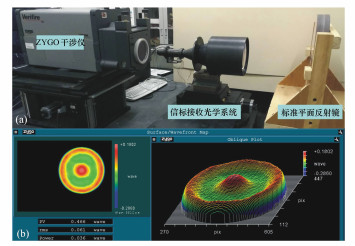
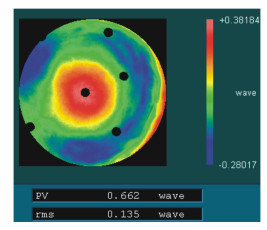
In order to ensure the stable tracking accuracy of the photoelectric tracking and aiming system of the mobile ground station in the complex environment in the field, the optical system and optical structure are designed to solve the problem of imaging spot dispersion of the beacon receiving lens under the working temperature width of -20~40℃. A temperature compensation scheme for driving the compensation lens group with a stepping motor is proposed. The change of optical system performance under extreme temperature conditions and the effect of different temperature compensation schemes are analyzed. According to the requirements of photoelectric tracking and aiming system, the opto-mechanical structure is designed and the mechanical and optical properties are analyzed. The analysis results show that the first-order mode of the system is 370 Hz; the compensation lens group moves forward by 0.695 mm to compensate the dispersion of the optical system imaging spot at -20℃, and the central field spot size is reduced from 73 μm to 3.2 μm and the edge field spot size is reduced from 77 μm to 15.7 μm; moving back 0.885 6 mm can compensate for the dispersion of the imaging spot at 40℃, reducing the central field spot size from 94 μm to 3.9 μm, and the edge field spot size from 96 μm to 21.8 μm. The image quality of the optical system is also detected using a ZYGO interferometer. The RMS (root mean square) valueof the wave aberration is 0.061λ (λ=632.8 nm), and the PV (peak-to-valley) value is 0.466λ, which can satisfy the index requirements of the tracking and aiming system.
In order to ensure the stable tracking accuracy of the photoelectric tracking and aiming system of the mobile ground station in the complex environment in the field, the optical system and optical structure are designed to solve the problem of imaging spot dispersion of the beacon receiving lens under the working temperature width of -20~40℃. A temperature compensation scheme for driving the compensation lens group with a stepping motor is proposed. The change of optical system performance under extreme temperature conditions and the effect of different temperature compensation schemes are analyzed. According to the requirements of photoelectric tracking and aiming system, the opto-mechanical structure is designed and the mechanical and optical properties are analyzed. The analysis results show that the first-order mode of the system is 370 Hz; the compensation lens group moves forward by 0.695 mm to compensate the dispersion of the optical system imaging spot at -20℃, and the central field spot size is reduced from 73 μm to 3.2 μm and the edge field spot size is reduced from 77 μm to 15.7 μm; moving back 0.885 6 mm can compensate for the dispersion of the imaging spot at 40℃, reducing the central field spot size from 94 μm to 3.9 μm, and the edge field spot size from 96 μm to 21.8 μm. The image quality of the optical system is also detected using a ZYGO interferometer. The RMS (root mean square) valueof the wave aberration is 0.061λ (λ=632.8 nm), and the PV (peak-to-valley) value is 0.466λ, which can satisfy the index requirements of the tracking and aiming system.
2018, 11(5): 798-803.
doi: 10.3788/CO.20181105.0798
Abstract:
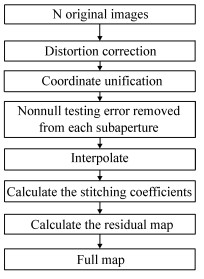
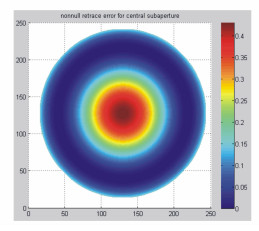
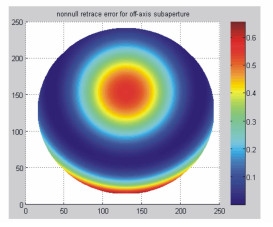
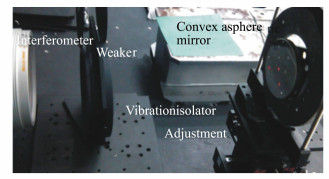
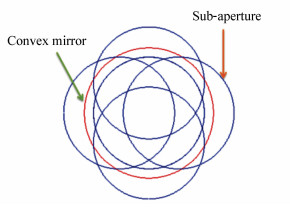
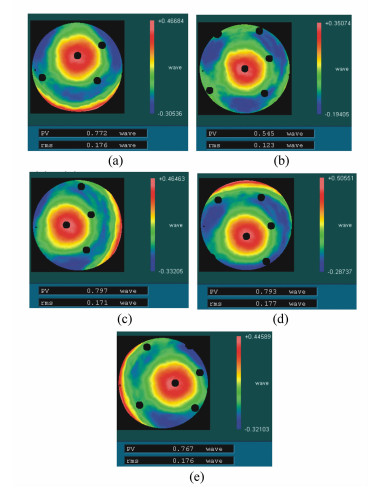
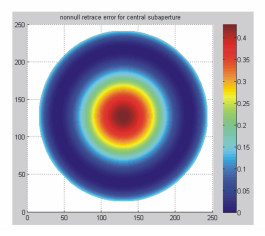
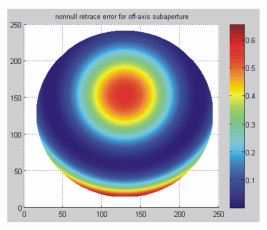
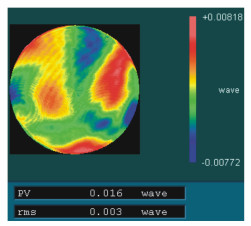
In order to realize the high-precision detection of large-caliber convex aspherical mirrors, we study the convex aspheric non-null sub-aperture stitching detection technology, and establish a set of non-null stitching detection algorithm model, in which the test errors introduced by non-null detection of the coaxial sub-aperture and the off-axis sub-aperture are modeled and analyzed. At the same time, testing error elimination, stitching coefficients calculation and full-aperture surface acquiring are also analyzed. Finally, combined with actual project, stitching detection of a convex hyperboloid with a diameter of 130 mm is performed. The non-null detection error form of each test sub-aperture of the aspheric surface is discussed, and error elimination, full-aperture surface acquiring and other work are carried out. It can be found from the stitching result that the stitching is smooth, continuous, and there is no stitching trace. To further verify the stitching accuracy, we compare the stitching result with the sub-aperture testing result. The self-test sub-aperture evaluation method is used to calculate the residual map of the self-test sub-aperture and the stitching result in the self-test sub-aperture range. The PV and RMS values of the residual map are 0.016λ and 0.003λ, respectively. From the above results, it can be concluded that the test results of the self-test sub-aperture and the stitching result are consistent within the self-test sub-aperture range, thus verifying the stitching accuracy of the algorithm.
In order to realize the high-precision detection of large-caliber convex aspherical mirrors, we study the convex aspheric non-null sub-aperture stitching detection technology, and establish a set of non-null stitching detection algorithm model, in which the test errors introduced by non-null detection of the coaxial sub-aperture and the off-axis sub-aperture are modeled and analyzed. At the same time, testing error elimination, stitching coefficients calculation and full-aperture surface acquiring are also analyzed. Finally, combined with actual project, stitching detection of a convex hyperboloid with a diameter of 130 mm is performed. The non-null detection error form of each test sub-aperture of the aspheric surface is discussed, and error elimination, full-aperture surface acquiring and other work are carried out. It can be found from the stitching result that the stitching is smooth, continuous, and there is no stitching trace. To further verify the stitching accuracy, we compare the stitching result with the sub-aperture testing result. The self-test sub-aperture evaluation method is used to calculate the residual map of the self-test sub-aperture and the stitching result in the self-test sub-aperture range. The PV and RMS values of the residual map are 0.016λ and 0.003λ, respectively. From the above results, it can be concluded that the test results of the self-test sub-aperture and the stitching result are consistent within the self-test sub-aperture range, thus verifying the stitching accuracy of the algorithm.
2018, 11(5): 804-811.
doi: 10.3788/CO.20181105.0804
Abstract:
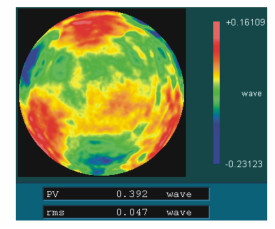
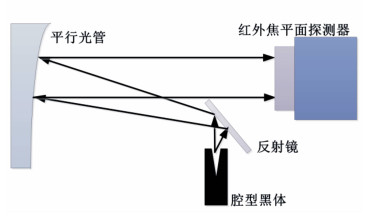
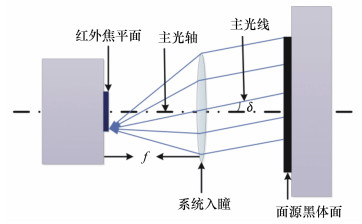
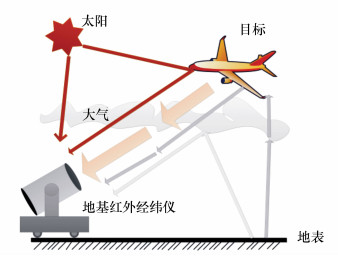
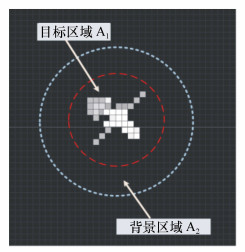
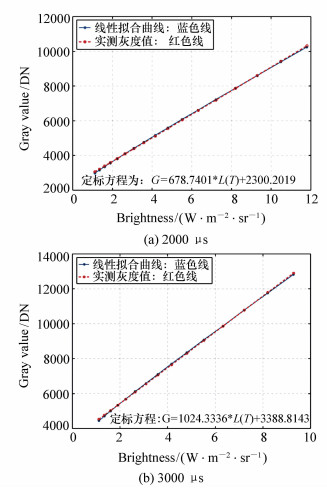
The ground-based infrared theodolite is one of the most important means of measuring infrared data of military and scientific targets in space. With the rapid development of modern weapons technology in stealth, the measurement of surface target is becoming more and more important and the radiation brightness is a key indicator of surface type infrared combat. Therefore, it is of great significance to study area analysis method and radiance calculation method to test the stealth performance of the aviation target and to develop surface type infrared false target. In this paper, a simple and reliable method for extracting surface targets is proposed. By this method, radiation measurement is performed on a 600 mm aperture infrared theodolite. The measured data is compared with the standard brightness value after atmospheric correction. The experimental results show that the maximum error of the radiance inversion is 11.38% and the root mean square error is 7.36%. The experimental results show the effectiveness and reliability of the measurement method.
The ground-based infrared theodolite is one of the most important means of measuring infrared data of military and scientific targets in space. With the rapid development of modern weapons technology in stealth, the measurement of surface target is becoming more and more important and the radiation brightness is a key indicator of surface type infrared combat. Therefore, it is of great significance to study area analysis method and radiance calculation method to test the stealth performance of the aviation target and to develop surface type infrared false target. In this paper, a simple and reliable method for extracting surface targets is proposed. By this method, radiation measurement is performed on a 600 mm aperture infrared theodolite. The measured data is compared with the standard brightness value after atmospheric correction. The experimental results show that the maximum error of the radiance inversion is 11.38% and the root mean square error is 7.36%. The experimental results show the effectiveness and reliability of the measurement method.
2018, 11(5): 812-821.
doi: 10.3788/CO.20181105.0812
Abstract:
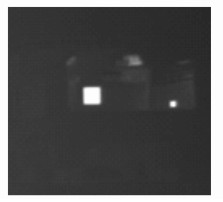
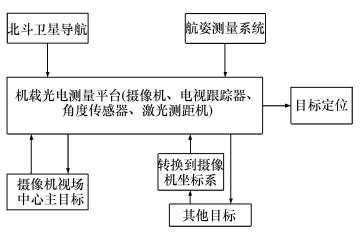
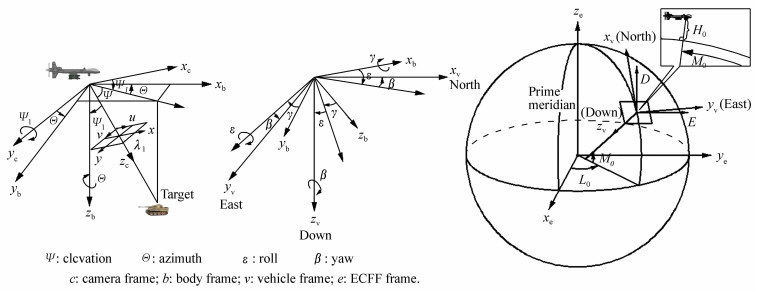
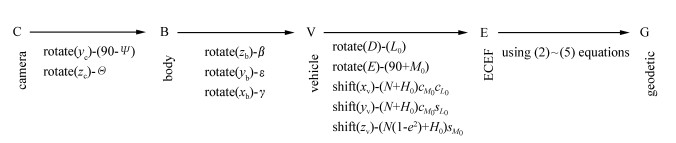
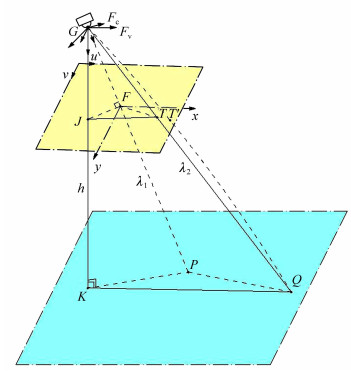
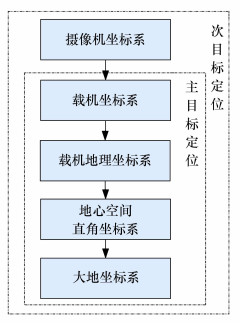
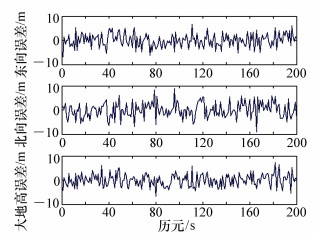
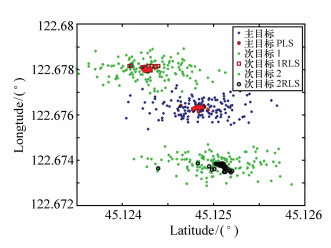
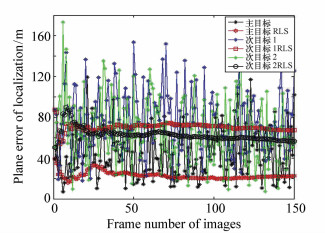
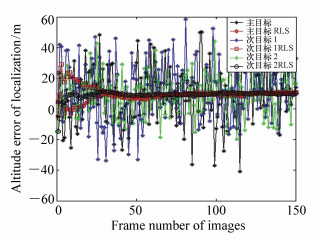
Target location is a crucial step in UAV reconnaissance system. In order to enhance the real-time performance of UAV reconnaissance target location and improve location precision, an effective multi-target real-time location method is proposed, which establishes the primary and secondary target location geometric relationship and coordinate transformation model, and combines known data to obtain each target geodetic coordinates, as well as analyzes target location error through Monte Carlo method. Finally, based on the upcoming successful establishment of the Beidou Ⅱ satellite navigation system for the aerial positioning of the UAV, and the filter processing using the Recursive Least Squares algorithm, the target location accuracy is improved. The research and experimental results show that Beidou Ⅱ navigation positioning can effectively improve the aerial positioning accuracy of the UAV, and it is expected to achieve centimeter-level accuracy. At the same time, the RLS filter processing can improve the target positioning accuracy by about 10 m. It is concluded that this method can effectively enhance the real-time positioning of UAVs, improve positioning accuracy and reconnaissance efficiency.
Target location is a crucial step in UAV reconnaissance system. In order to enhance the real-time performance of UAV reconnaissance target location and improve location precision, an effective multi-target real-time location method is proposed, which establishes the primary and secondary target location geometric relationship and coordinate transformation model, and combines known data to obtain each target geodetic coordinates, as well as analyzes target location error through Monte Carlo method. Finally, based on the upcoming successful establishment of the Beidou Ⅱ satellite navigation system for the aerial positioning of the UAV, and the filter processing using the Recursive Least Squares algorithm, the target location accuracy is improved. The research and experimental results show that Beidou Ⅱ navigation positioning can effectively improve the aerial positioning accuracy of the UAV, and it is expected to achieve centimeter-level accuracy. At the same time, the RLS filter processing can improve the target positioning accuracy by about 10 m. It is concluded that this method can effectively enhance the real-time positioning of UAVs, improve positioning accuracy and reconnaissance efficiency.
2018, 11(5): 822-831.
doi: 10.3788/CO.20181105.0822
Abstract:
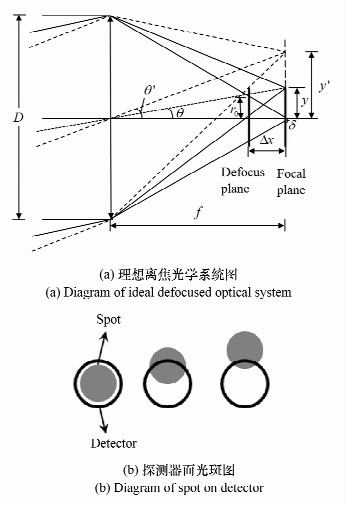
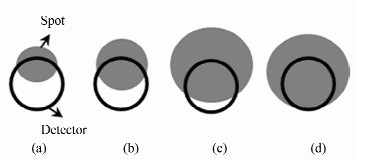
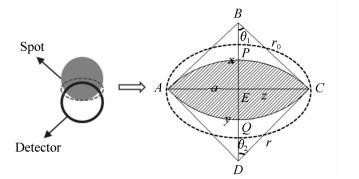
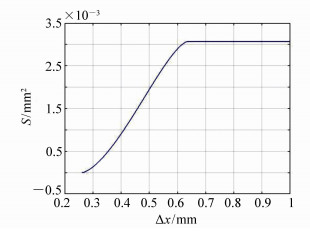
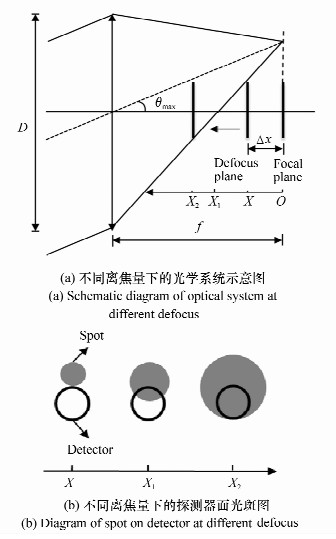
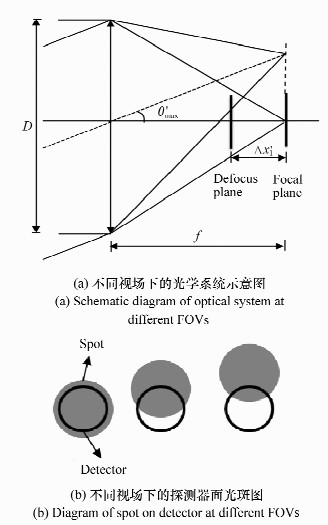
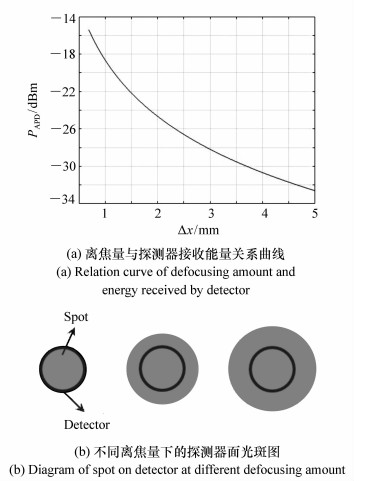
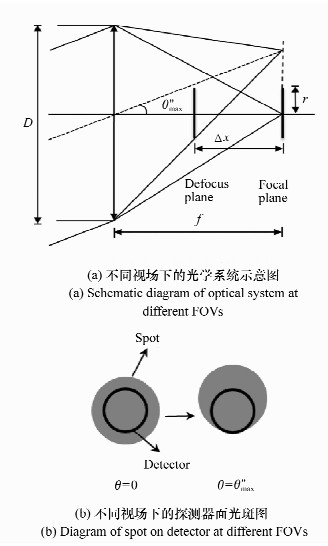
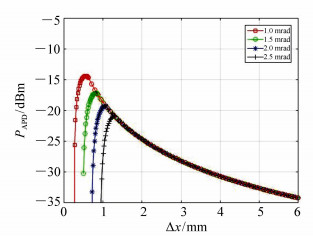
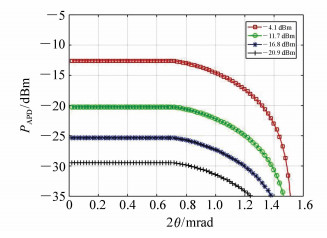
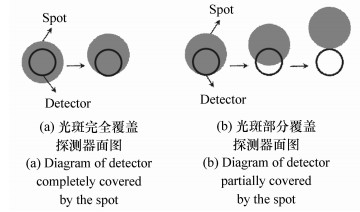
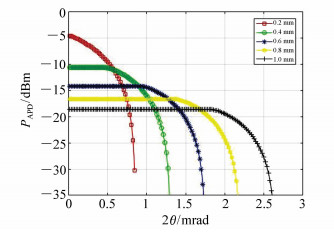
A defocus method is proposed in this paper to increase the receiving field of view and reduce the difficulty of alignment in free space laser communication. Based on the minimum energy required for communication (-35 dBm), the relationship between detector receiving energy, receiving field of view (FOV), defocus receiving energy and defocusing amount is theoretically derived and simulated by Matlab. We analyses and compare the influence of defocused receiving energy and defocusing on the received field of view. The results show that when the defocusing amount is 0.5 mm, the defocus receiving energy is increased from -20.9 dBm to -4.1 dBm, the receiving FOV can be increased by 0.27 mrad. When the defocus receiving energy is -4.1 dBm, the defocus amount is increased from 0.2 mm to 1.0 mm, the FOV will be increased by 1.75 mrad. The comparison shows that increasing the defocus receiving energy and expanding the defocusing amount can increase the receiving field of view, and the effect of expanding the defocusing amount is relatively significant, which provides a theoretical guidance for the design of the subsequent defocusing system.
A defocus method is proposed in this paper to increase the receiving field of view and reduce the difficulty of alignment in free space laser communication. Based on the minimum energy required for communication (-35 dBm), the relationship between detector receiving energy, receiving field of view (FOV), defocus receiving energy and defocusing amount is theoretically derived and simulated by Matlab. We analyses and compare the influence of defocused receiving energy and defocusing on the received field of view. The results show that when the defocusing amount is 0.5 mm, the defocus receiving energy is increased from -20.9 dBm to -4.1 dBm, the receiving FOV can be increased by 0.27 mrad. When the defocus receiving energy is -4.1 dBm, the defocus amount is increased from 0.2 mm to 1.0 mm, the FOV will be increased by 1.75 mrad. The comparison shows that increasing the defocus receiving energy and expanding the defocusing amount can increase the receiving field of view, and the effect of expanding the defocusing amount is relatively significant, which provides a theoretical guidance for the design of the subsequent defocusing system.

2018, 11(5): 832-840.
doi: 10.3788/CO.20181105.0832
Abstract:
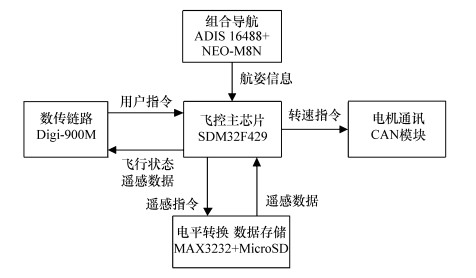
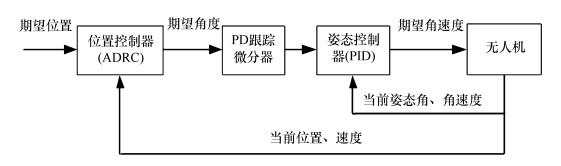
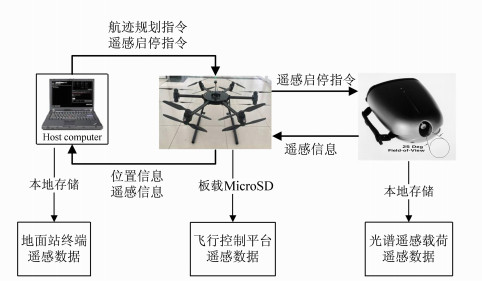
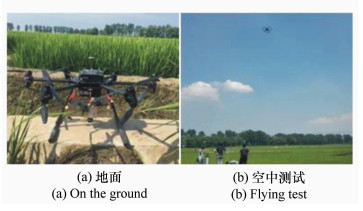
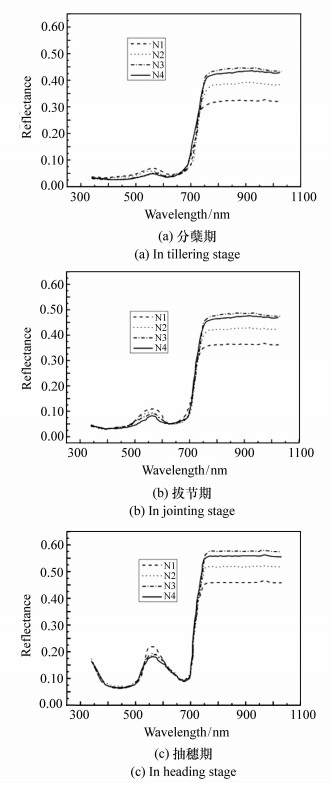
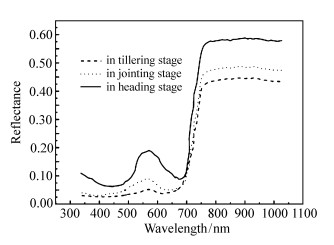
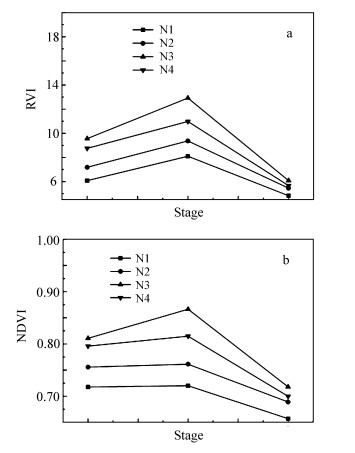
Satellite remote sensing has low spatial resolution and is susceptible to the atmosphere, cloud layer, rain, and snow and so on. In this paper, the coaxial remote sensing system is constructed by using a coaxial 12-rotor unmanned aerial vehicle with spectrometer. Firstly, the self-designed UAV structure and flight control system are introduced, and a multi-link data backup UAV remote sensing data acquisition system is built around the flight platform, control system and remote sensing load. Then, the change of spectral index of four rices with different nitrogen levels is tested. Finally, by analyzing the experimental data, it can be obtained that the spectral reflectance of rice canopy decreases with the increase of nitrogen level in the visible region, and the spectral reflectance increases with the increase of nitrogen level in the near-infrared region. However, when the nitrogen level is increased to a certain extent, the increase of nitrogen will cause the reflectivity to decrease. Under the four nitrogen levels, the RVI and NDVI increased from tillering stage to jointing stage, then decreased gradually in heading stage, and the values of RVI and NDVI at heading stage are lower than those of RVI and NDVI in tillering stage. The test shows that the multi-rotor UAV platform equipped with a spectrometer composed of agricultural remote sensing monitoring system is feasible in the inversion of crop vegetation index. The UAV remote sensing data acquisition system designed in this paper can obtain remote sensing information effectively and in real time. The real time information of farmland with high spatial resolution and spectral resolution can provide necessary data support for crop growth analysis and health monitoring.
Satellite remote sensing has low spatial resolution and is susceptible to the atmosphere, cloud layer, rain, and snow and so on. In this paper, the coaxial remote sensing system is constructed by using a coaxial 12-rotor unmanned aerial vehicle with spectrometer. Firstly, the self-designed UAV structure and flight control system are introduced, and a multi-link data backup UAV remote sensing data acquisition system is built around the flight platform, control system and remote sensing load. Then, the change of spectral index of four rices with different nitrogen levels is tested. Finally, by analyzing the experimental data, it can be obtained that the spectral reflectance of rice canopy decreases with the increase of nitrogen level in the visible region, and the spectral reflectance increases with the increase of nitrogen level in the near-infrared region. However, when the nitrogen level is increased to a certain extent, the increase of nitrogen will cause the reflectivity to decrease. Under the four nitrogen levels, the RVI and NDVI increased from tillering stage to jointing stage, then decreased gradually in heading stage, and the values of RVI and NDVI at heading stage are lower than those of RVI and NDVI in tillering stage. The test shows that the multi-rotor UAV platform equipped with a spectrometer composed of agricultural remote sensing monitoring system is feasible in the inversion of crop vegetation index. The UAV remote sensing data acquisition system designed in this paper can obtain remote sensing information effectively and in real time. The real time information of farmland with high spatial resolution and spectral resolution can provide necessary data support for crop growth analysis and health monitoring.
2018, 11(5): 841-850.
doi: 10.3788/CO.20181105.0841
Abstract:
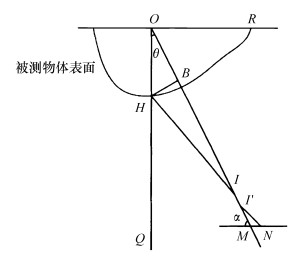
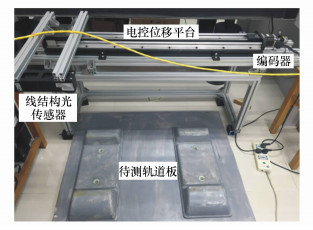
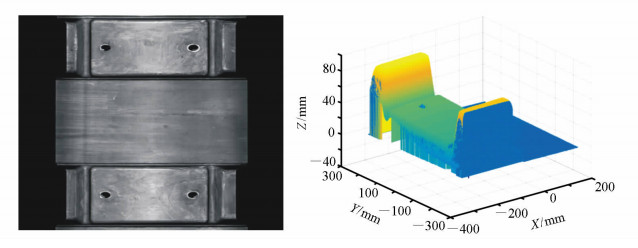
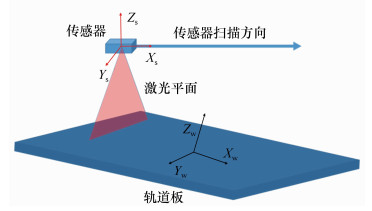
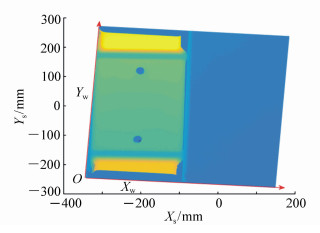
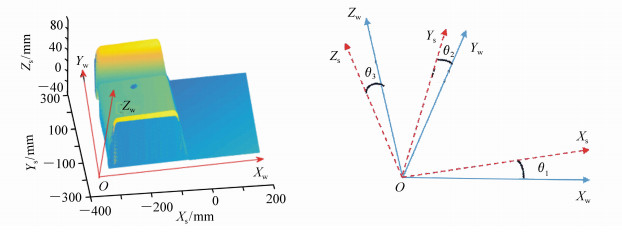
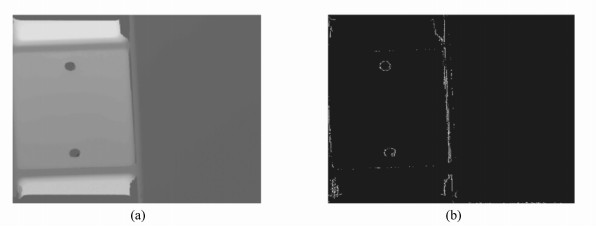
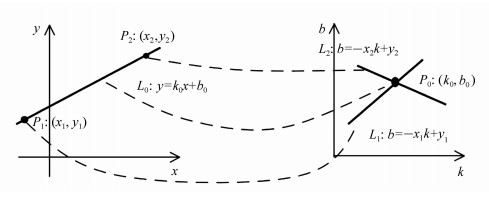
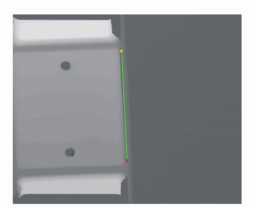
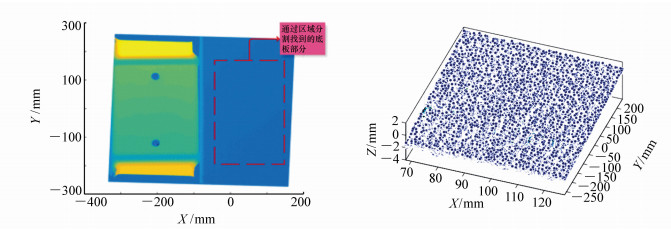
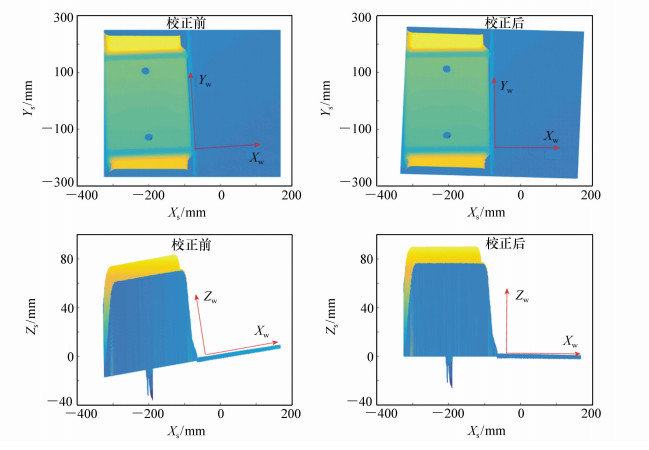
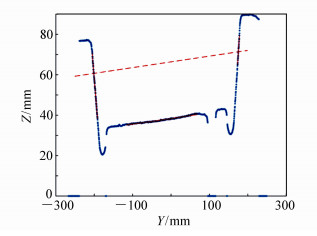
The dimensional accuracy of track slab plays an important role in ensuring the quality of the high-speed railway track. Aiming at the problems existing in the pressent track slam detection methods, we establish a track slam measurement system based on line-structured light sensor and propose a geometric parameter measurement method based on track slam point cloud data. The line-structured laser sensor scans the CRTS Ⅲ type track slab at regular intervals to obtain point cloud data. The position and attitude of the entire point cloud data are corrected by using the point cloud data at a special position in the track slam. Finally, according to the definition of the characteristic parameters, the rapid non-contact measurement of four key geometric parameters of track slab is realized. The experimental results show that the measurement accuracy of this proposed method can reach 0.2 mm, which meets the on-line detection requirements of track slabs.
The dimensional accuracy of track slab plays an important role in ensuring the quality of the high-speed railway track. Aiming at the problems existing in the pressent track slam detection methods, we establish a track slam measurement system based on line-structured light sensor and propose a geometric parameter measurement method based on track slam point cloud data. The line-structured laser sensor scans the CRTS Ⅲ type track slab at regular intervals to obtain point cloud data. The position and attitude of the entire point cloud data are corrected by using the point cloud data at a special position in the track slam. Finally, according to the definition of the characteristic parameters, the rapid non-contact measurement of four key geometric parameters of track slab is realized. The experimental results show that the measurement accuracy of this proposed method can reach 0.2 mm, which meets the on-line detection requirements of track slabs.


2018, 11(5): 851-859.
doi: 10.3788/CO.20181105.0851
Abstract:
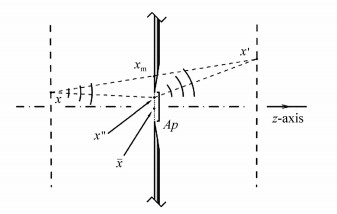
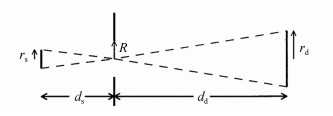
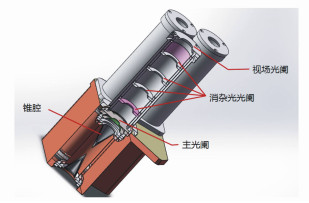
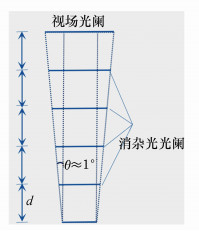
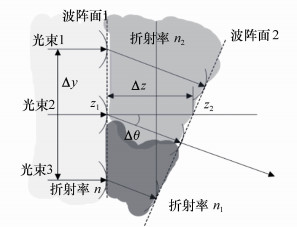
Solar radiation measurement is one of the important way to study solar activity and evolution of Earth's climate, which is of great significance to the sustainable development of human society. As one of the main sources of systematic errors in the measurement, diffraction effect must be accurately corrected so as to improve the reliability of the measurement data. China has little research on the diffraction effects in solar radiometers, and there are currently no related corrections. With the increase demand of the accuracy of solar radiation measurements, it is necessary to systematically study the diffraction effect. Firstly, the diffraction effect theory is studied. According to the Kirchhoff diffraction theory as well as the Gaussian optical approximation, the energy transfer relations between points and points, points and faces, and between faces is gradually determined, and the general formula of diffraction effect is derived. Then a simplified calculation method is obtained according to the asymptotic property of the diffraction effect. The diffraction effect of the Solar Irradiation Absolute Radiometer (SIAR) and the diffraction correction factor are then calculated through a simplified method. Finally, based on the diffraction correction results, the scaling factor relative to the World Radiation Reference (WRR) is calculated. As a result, the diffraction effects and diffraction correction factors of SIAR are about 1.002 742 and 0.997 225, respectively. In addition, the calibration coefficient of SIAR for WRR is closer to 1, indicating that the diffraction correction reduces the systematic error and improves the accuracy of the radiation measurement.
Solar radiation measurement is one of the important way to study solar activity and evolution of Earth's climate, which is of great significance to the sustainable development of human society. As one of the main sources of systematic errors in the measurement, diffraction effect must be accurately corrected so as to improve the reliability of the measurement data. China has little research on the diffraction effects in solar radiometers, and there are currently no related corrections. With the increase demand of the accuracy of solar radiation measurements, it is necessary to systematically study the diffraction effect. Firstly, the diffraction effect theory is studied. According to the Kirchhoff diffraction theory as well as the Gaussian optical approximation, the energy transfer relations between points and points, points and faces, and between faces is gradually determined, and the general formula of diffraction effect is derived. Then a simplified calculation method is obtained according to the asymptotic property of the diffraction effect. The diffraction effect of the Solar Irradiation Absolute Radiometer (SIAR) and the diffraction correction factor are then calculated through a simplified method. Finally, based on the diffraction correction results, the scaling factor relative to the World Radiation Reference (WRR) is calculated. As a result, the diffraction effects and diffraction correction factors of SIAR are about 1.002 742 and 0.997 225, respectively. In addition, the calibration coefficient of SIAR for WRR is closer to 1, indicating that the diffraction correction reduces the systematic error and improves the accuracy of the radiation measurement.
2018, 11(5): 860-873.
doi: 10.3788/CO.20181105.0860
Abstract:
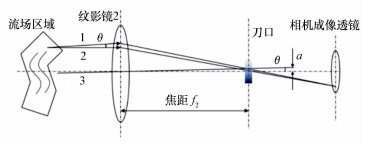
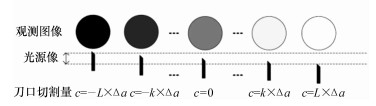
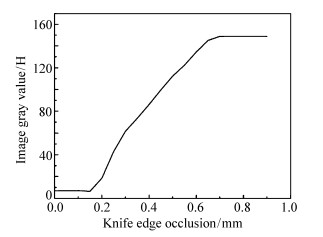
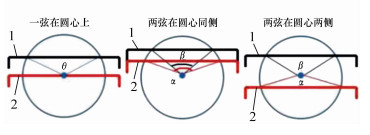
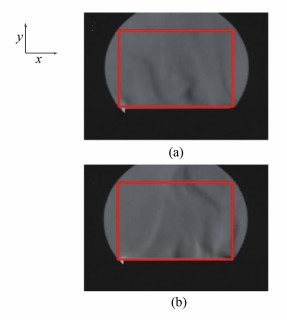
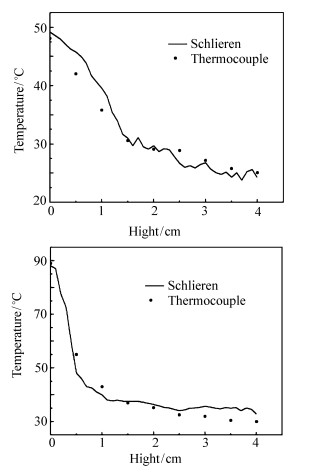
In order to study temperature field measurement techniques of Schlieren systems, the principle of Schlieren quantitative measuring techniques is expounded. Based on the relationship between the grayness of a Schlieren image, along with the area of a light source, we propose an algorithm that is dependent on Schlieren to calculate flow field temperature. Firstly, a transmission Schlieren system is built on an optical platform and a hot plate is placed in the test area. Schlieren images are then captured by using a CCD camera, which are uploaded and stored on a computer for image processing. Finally, the algorithm is used to get the measured values of the temperature field, which then are compared with those by thermocouple measurement. The experimental results show that, when the temperature of the hot plate is set at 50℃ or 90℃, the relative errors of the flow field temperature measurement are less than 10%, the reliability of the algorithm is therefore proved and the quantitative measurement of temperature fields based on Schlieren techniques is realized.
In order to study temperature field measurement techniques of Schlieren systems, the principle of Schlieren quantitative measuring techniques is expounded. Based on the relationship between the grayness of a Schlieren image, along with the area of a light source, we propose an algorithm that is dependent on Schlieren to calculate flow field temperature. Firstly, a transmission Schlieren system is built on an optical platform and a hot plate is placed in the test area. Schlieren images are then captured by using a CCD camera, which are uploaded and stored on a computer for image processing. Finally, the algorithm is used to get the measured values of the temperature field, which then are compared with those by thermocouple measurement. The experimental results show that, when the temperature of the hot plate is set at 50℃ or 90℃, the relative errors of the flow field temperature measurement are less than 10%, the reliability of the algorithm is therefore proved and the quantitative measurement of temperature fields based on Schlieren techniques is realized.