


-
摘要:
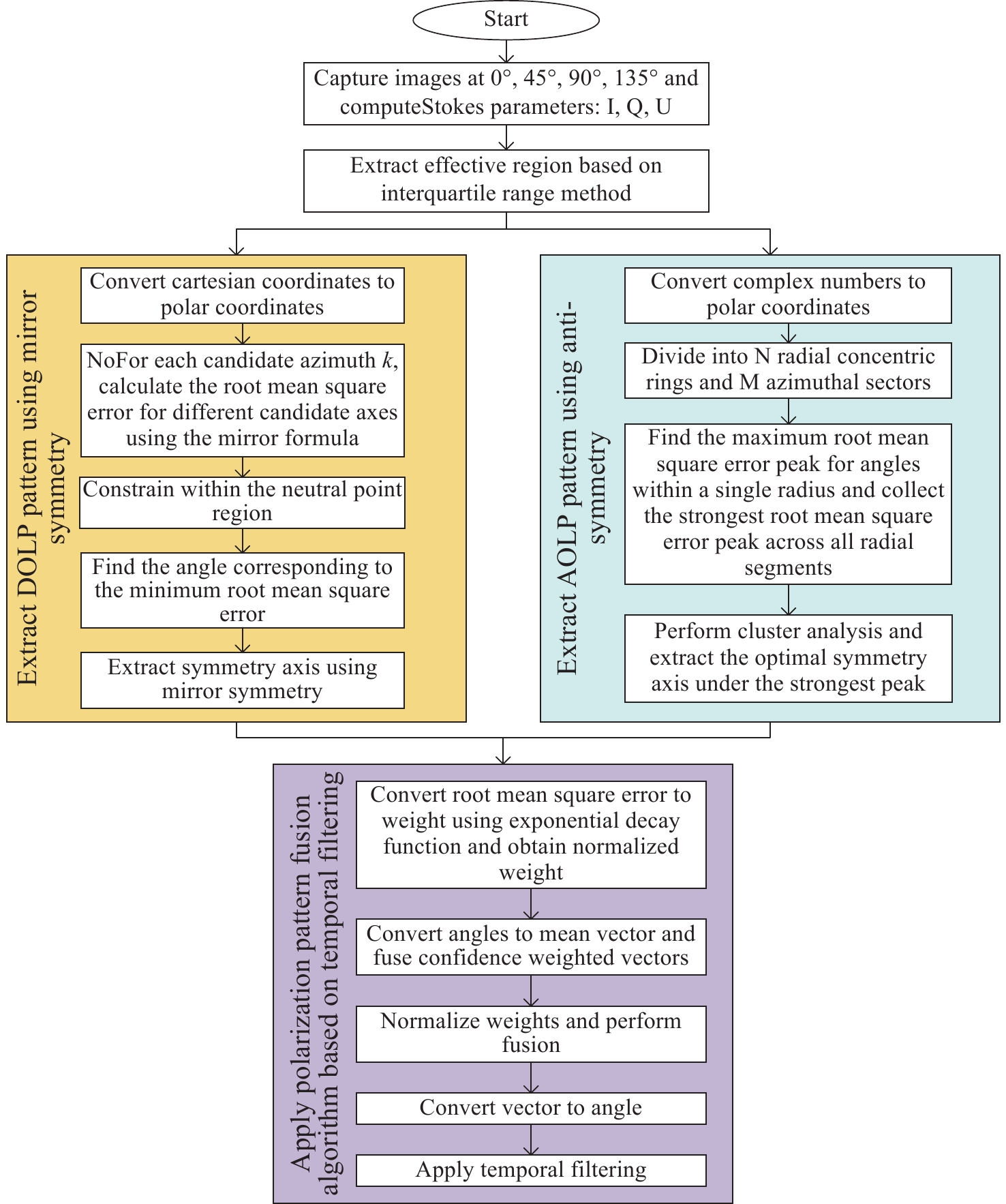
针对单一偏振模式提取太阳子午线噪声大、精度低的问题,本文提出一种双偏振模式融合方法。该方法首先基于四分位距法对偏振场进行预处理,随后结合线偏振度的镜像对称性与偏振角的反对称特性,通过复数域变换及径向-角向分割分析,融合全局与局部偏振特征。最后,依据太阳运动规律和中性点约束进行时序滤波,从而提升提取精度。在晴天、多云、雾天、沙尘等多种天气条件下的实验表明,该方法相对于天文太阳方位基准的平均相对误差分别为0.02、0.051、0.053与0.017,优于单一特征方法。本研究不仅为自主系统提供偏振航向参考,也为融合全局与局部偏振特征提供一种可扩展计算思路。
Abstract:To address the issues of high noise and low accuracy in solar meridian extraction using a single polarization mode, this paper proposes a dual-polarization mode fusion method. First, the method preprocesses the polarization field using the interquartile range method. Then, by combining the mirror symmetry of the degree of linear polarization with the anti-symmetry of the angle of polarization and applying complex domain transformation along with radial-azimuthal segmentation analysis, the method fuses global and local polarization features. Finally, temporal filtering is applied based on solar motion law and the neutral point constraint, further improving extraction accuracy. Experimental evaluation under diverse conditions demonstrates that the complete pipeline achieves mean relative errors of 0.02 (sunny), 0.051 (cloudy), 0.053 (fog), and 0.017 (dust) against the astronomical solar azimuth references, substantially outperforming single-feature methods. This study not only provides a polarization-based heading reference for autonomous systems, but also offers a scalable computational paradigm for integrating global and local polarization features.
-
Key words:
- polarization image /
- skylight polarization pattern /
- sun meridian /
- navigation
-
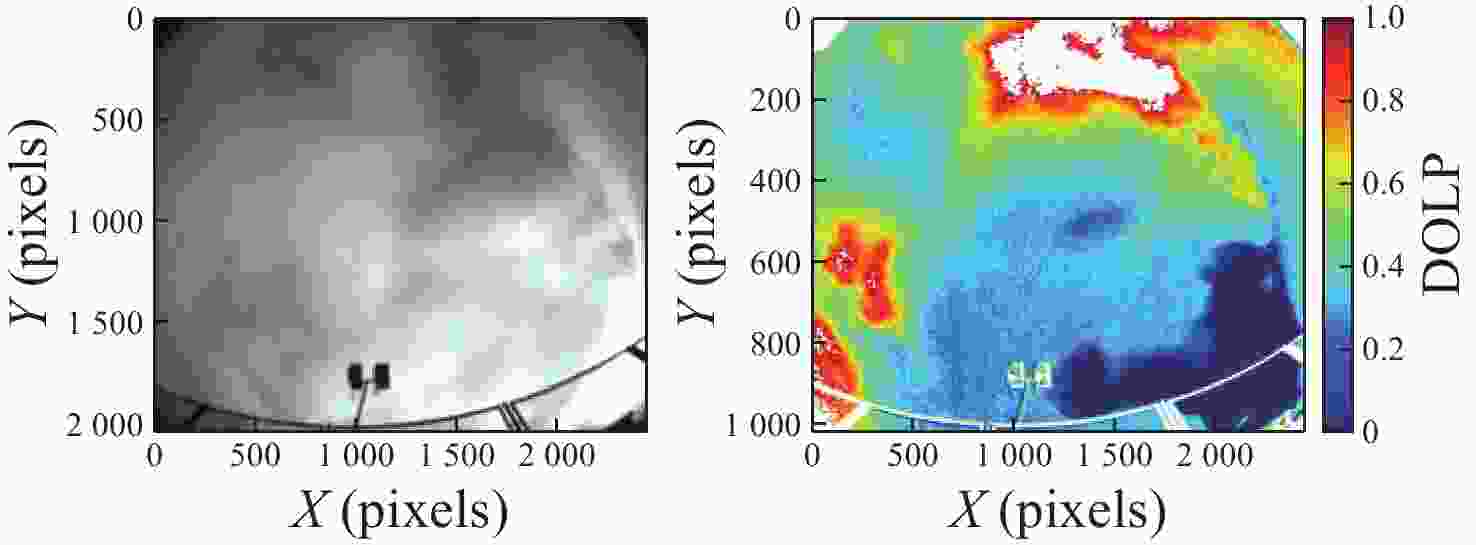
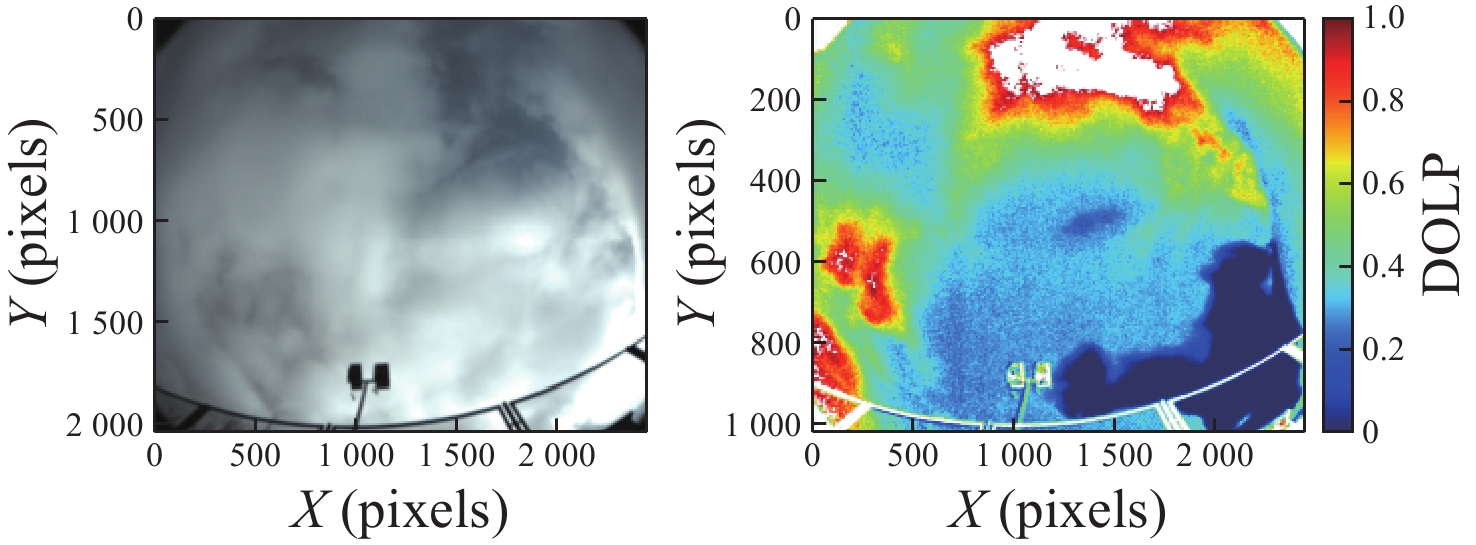
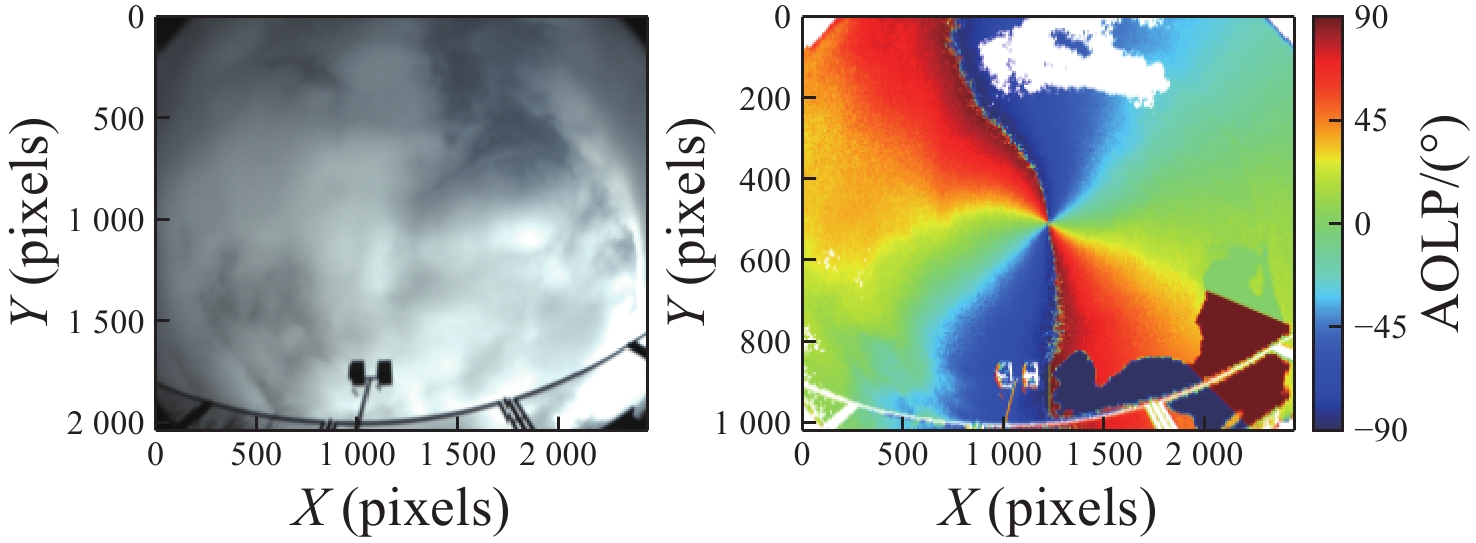
图 2 原始RGB图像与异常值去除后的DOLP图像对比
Figure 2. Comparison of original RGB image and DOLP image after outlier removal
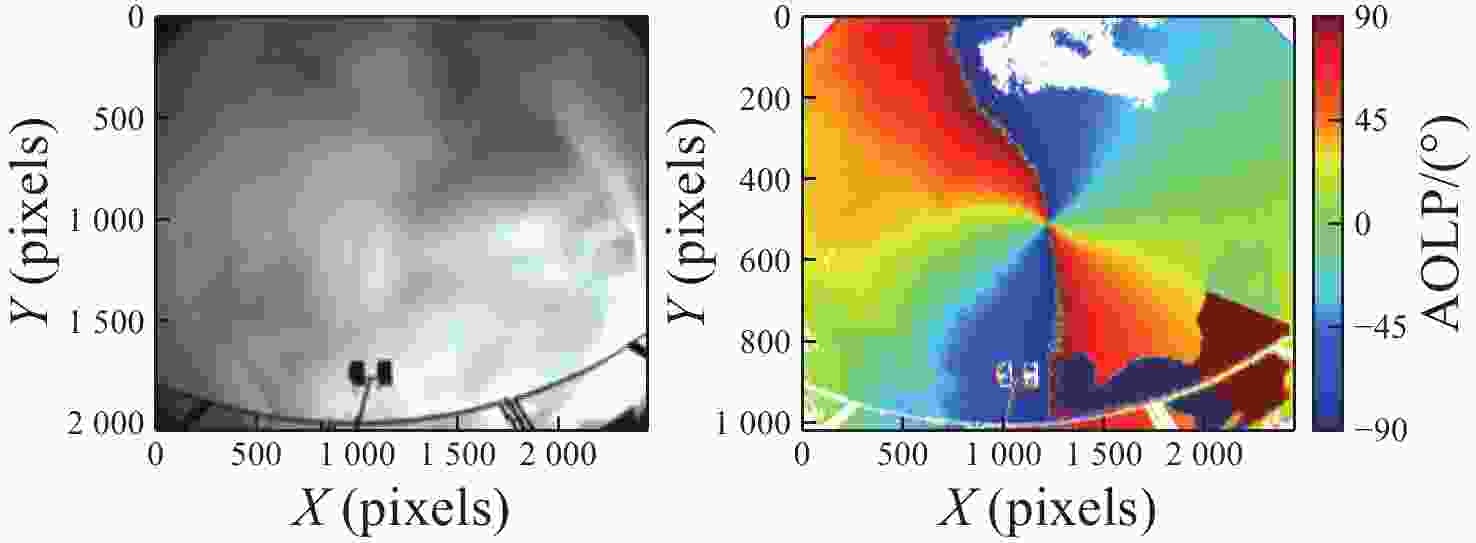
图 3 原始RGB图像与异常值去除后的AOLP图像对比
Figure 3. Comparison of original RGB image and AOLP image after outlier removal
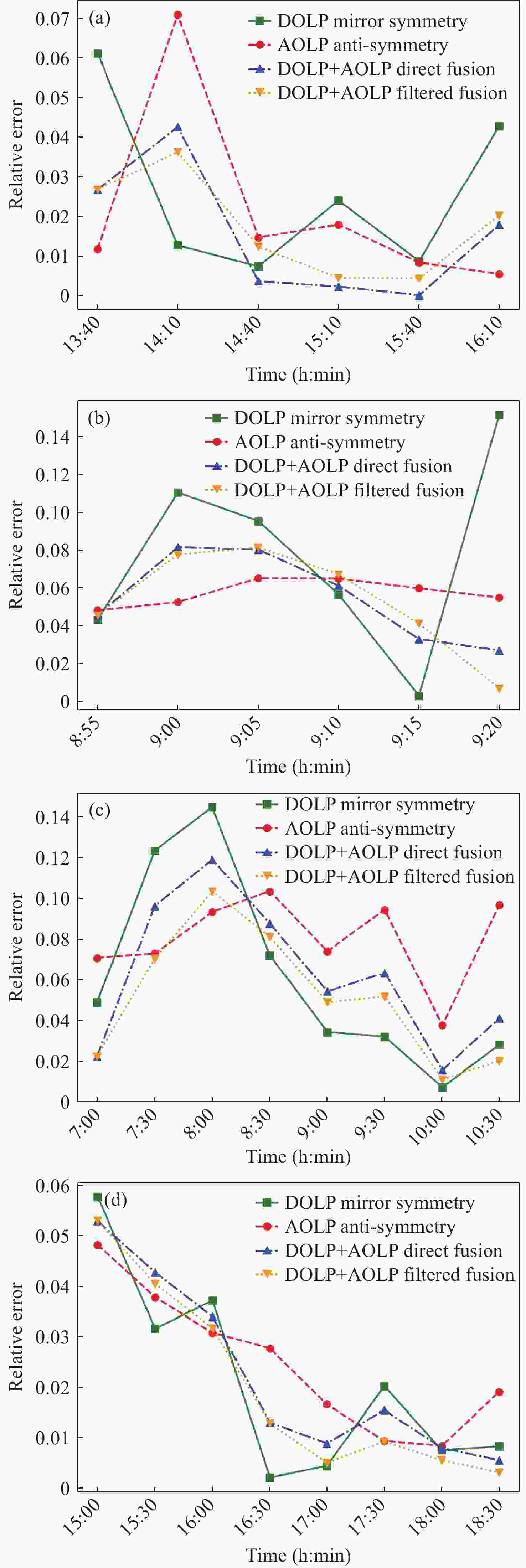
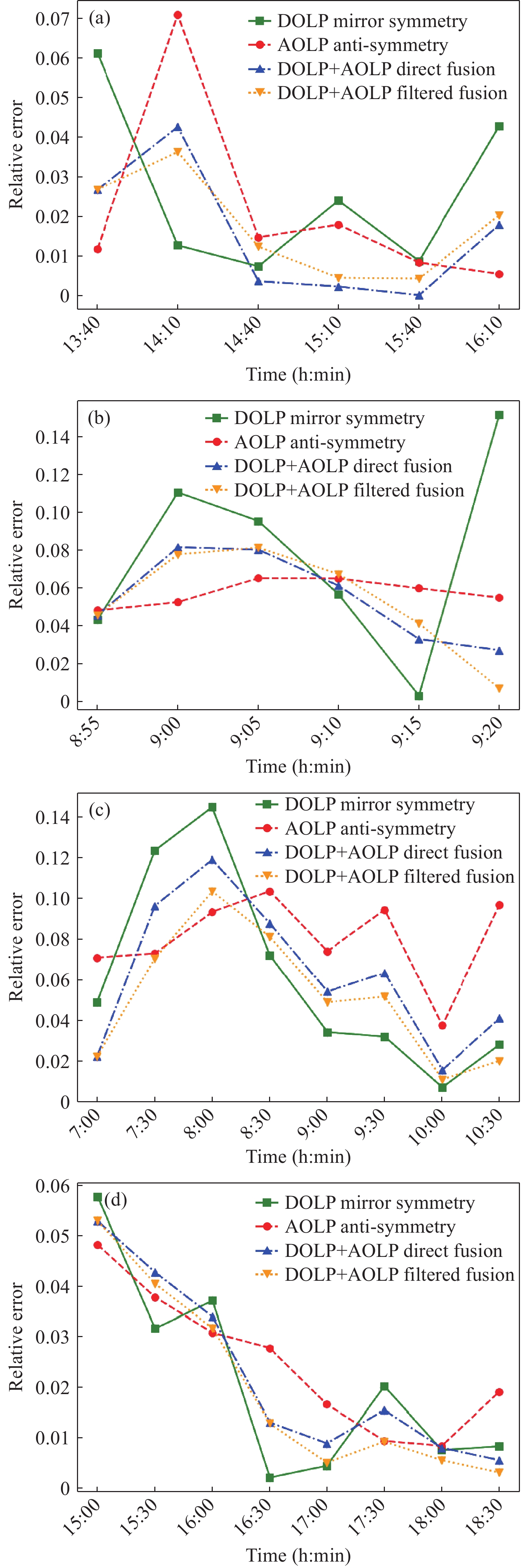
图 6 不同天气条件下的DOLP镜面对称、AOLP反对称、DOLP+AOLP直接融合及DOLP+AOLP融合后滤波的相对误差比较
Figure 6. Relative error comparison of DOLP mirror symmetry, AOLP anti-symmetry, DOLP+AOLP direct fusion, and DOLP+AOLP filtered fusion under different weather conditions
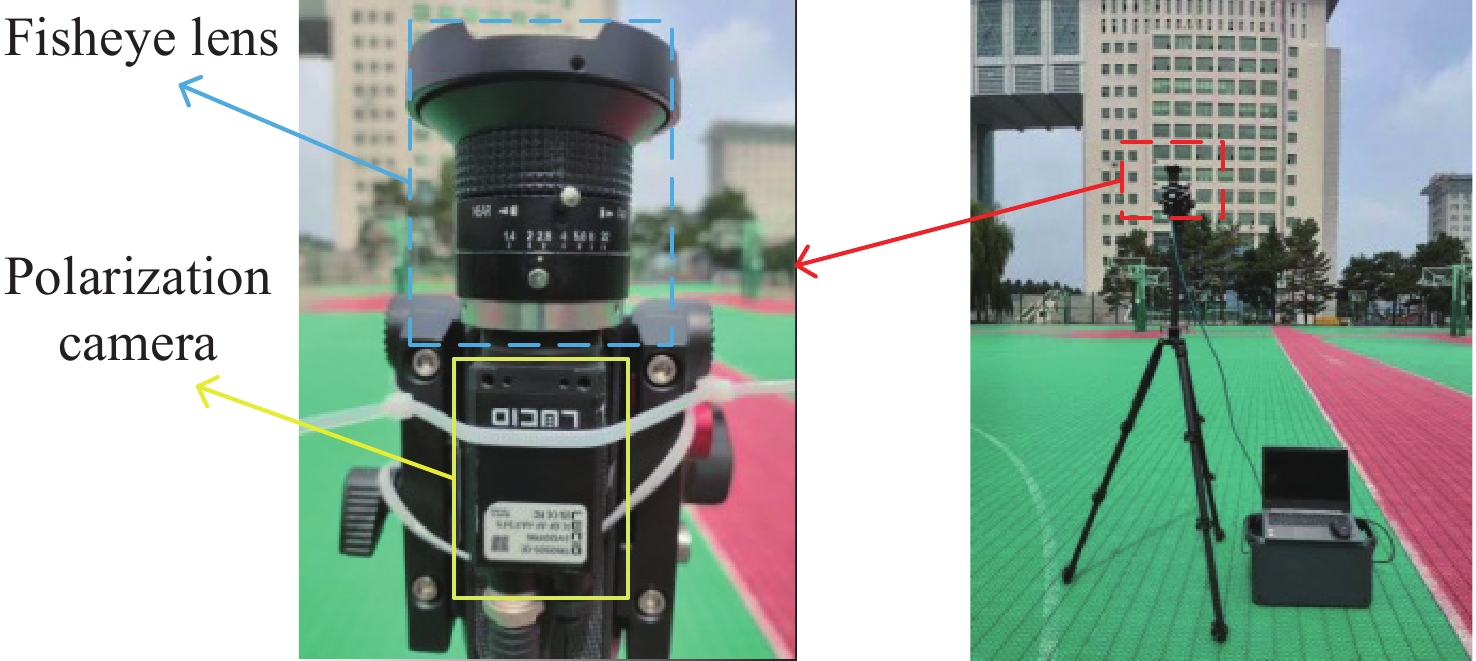
表 1 采集装置的具体参数
Table 1. Specific parameters of the acquisition device
Polarization camera Model TRI050S-QC Sensor Sony IMX250MYR Pixel size / um×um 3.45(H)×3.45(V) Resolution / px 2448 ×2048Fisheye lens Model CA3580B Field of view / ° 152 Focal length / mm 3.5  下载: 导出CSV
下载: 导出CSV
表 2 外场测试条件总结
Table 2. Summary of field measurement conditions
Date(year/month/day) Latitude and longitude(°N/°E) Weather 2024/10/30 43.8356 /125.3231 dust 2025/9/2 43.8281 /125.3078 fog 2025/9/3 43.8281 /125.3078 cloudy 2025/9/10 35.7686 /120.0303 sunny
下载: 导出CSV
表 3 沙尘天气下的偏振模式图案
Table 3. Polarization pattern under dust weather
Time(h/min) DOLP polarization pattern AOLP polarization pattern 13:40 

14:10 

14:40 

15:10 

15:40 

16;10 

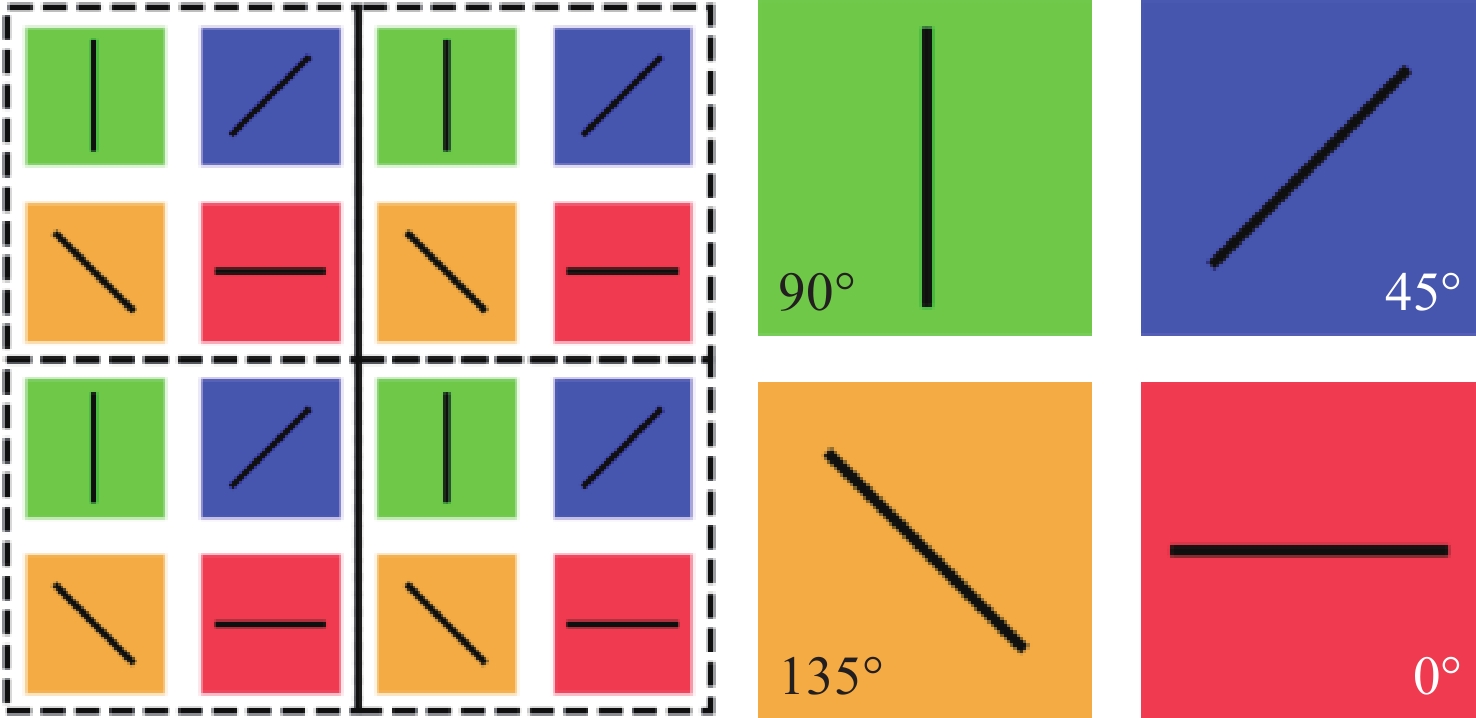
Legend 

 下载: 导出CSV
下载: 导出CSV
表 4 雾天下的偏振模式图案
Table 4. Polarization pattern under fog weather
Time(h/min) DOLP polarization pattern AOLP polarization pattern 8:55 

9:00 

9:05 

9:10 

9:15 

9:20 

Legend 

 下载: 导出CSV
下载: 导出CSV
表 5 多云天气下的偏振模式图案
Table 5. Polarization pattern under cloudy weather
Time(h/min) DOLP polarization pattern AOLP polarization pattern 7:00 

7:30 

8:00 

8:30 

9:00 

9:30 

10:00 

10:30 

Legend 

 下载: 导出CSV
下载: 导出CSV
表 6 晴天下的偏振模式图案
Table 6. Polarization pattern under sunny weather
Time(h/min) DOLP polarization pattern AOLP polarization pattern 15:00 

15:30 

16:00 

16:30 

17:00 

17:30 

18:00 

18:30 

Legend 

 下载: 导出CSV
下载: 导出CSV
表 7 不同天气条件下各算法的平均相对误差
Table 7. Mean relative errors of each algorithm under different weather conditions
Method
WeatherDOLP mirror
symmetryAOLP anti-
symmetryDOLP+AOLP
direct fusionDOLP+AOLP
filtered fusionDust 0.026 0.021 0.016 0.017 Fog 0.076 0.057 0.055 0.053 Cloudy 0.061 0.080 0.062 0.051 Sunny 0.021 0.025 0.023 0.020
下载: 导出CSV
表 8 不同方法提取太阳子午线的平均相对误差
Table 8. Mean relative errors of solar meridian extraction by different methods
下载: 导出CSV
-
[1] CHIPMAN R A, LAM W S T, YOUNG G. Polarized Light and Optical Systems[M]. Boca Raton: CRC Press, 2018. [2] HENSGEN R, ZITTRELL F, PFEIFFER K, et al. Performance of polarization-sensitive neurons of the locust central complex at different degrees of polarization[J]. Journal of Comparative Physiology A, 2022, 208(3): 387-403. doi: 10.1007/s00359-022-01545-2 [3] GREIF S, BORISSOV I, YOVEL Y, et al. A functional role of the sky’s polarization pattern for orientation in the greater mouse-eared bat[J]. Nature Communications, 2014, 5: 4488. doi: 10.1038/ncomms5488 [4] LEBHARDT F, RONACHER B. Transfer of directional information between the polarization compass and the sun compass in desert ants[J]. Journal of Comparative Physiology A, 2015, 201(6): 599-608. doi: 10.1007/s00359-014-0928-9 [5] UGOLINI A, YAMAHAMA Y, HARIYAMA T, et al. The use of the skylight polarization gradient in young sandhopper’s orientation[J]. Scientific Reports, 2025, 15(1): 17438. doi: 10.1038/s41598-025-02453-6 [6] DUPEYROUX J, DIPERI J, BOYRON M, et al. A bio-inspired celestial compass applied to an ant-inspired robot for autonomous navigation[C]. 2017 European Conference on Mobile Robots (ECMR), IEEE, 2017: 1-6. [7] SERRES J R, LAPRAY P J, VIOLLET S, et al. Passive polarized vision for autonomous vehicles: a review[J]. Sensors, 2024, 24(11): 3312. doi: 10.3390/s24113312 [8] SHABAYEK A E R, DEMONCEAUX C, MOREL O, et al. Vision based UAV attitude estimation: progress and insights[J]. Journal of Intelligent & Robotic Systems, 2012, 65(1-4): 295-308. doi: 10.1007/s10846-011-9588-y [9] ZHAO D H, LIU Y Z, WU X D, et al. Attitude-Induced error modeling and compensation with GRU networks for the polarization compass during UAV orientation[J]. Measurement, 2022, 190: 110734. doi: 10.1016/j.measurement.2022.110734 [10] LI SH, DAI C M, CHENG J M, et al. Advanced simulation and measurement of skylight polarization patterns across distinct aerosol type environments[J]. Science of the Total Environment, 2025, 967: 178768. doi: 10.1016/j.scitotenv.2025.178768 [11] BECK M, ALTHAUS V, PEGEL U, et al. Neurons sensitive to non-celestial polarized light in the brain of the desert locust[J]. Journal of Comparative Physiology A, 2023, 209(6): 907-928. doi: 10.1007/s00359-023-01618-w [12] MA T, HU X P, ZHANG L L, et al. An evaluation of skylight polarization patterns for navigation[J]. Sensors, 2015, 15(3): 5895-5913. doi: 10.3390/s150305895 [13] 杨江涛, 王明凯, 刘思拓, 等. 仿生偏振光罗盘太阳位置检测方法[J]. 中国光学(中英文), 2024, 17(3): 548-559.YANG J T, WANG M K, LIU S T, et al. Detection method of solar position using a biomimetic polarized light compass[J]. Chinese Optics, 2024, 17(3): 548-559. (in Chinese). [14] LIU B B, FAN ZH G, WANG X Q. Solar position acquisition method for polarized light navigation based on ∞ characteristic model of polarized skylight pattern[J]. IEEE Access, 2020, 8: 56720-56729. doi: 10.1109/ACCESS.2020.2982259 [15] 华豆, 范之国, 金海红, 等. 成像系统中偏振片初始方向对大气偏振模式测量精度的影响与校正方法[J]. 光学学报, 2022, 42(22): 2211003. doi: 10.3788/AOS202242.2211003HUA D, FAN ZH G, JIN H H, et al. Influence of initial orientation of polarizer in imaging system on measurement accuracy of atmospheric polarization pattern and correction method[J]. Acta Optica Sinica, 2022, 42(22): 2211003. (in Chinese). doi: 10.3788/AOS202242.2211003 [16] 黄玺铭, 胡摇, 郝群, 等. 一种基于视觉信息与偏振天光信息融合的航向角提取方法[J]. 光学技术, 2022, 48(5): 554-561.HUANG X M, HU Y, HAO Q, et al. A heading angle extraction method based on fusion of visual information and polarized skylight information[J]. Optical Technique, 2022, 48(5): 554-561. (in Chinese). [17] WANG J, HU P W, QIAN J Q, et al. Confocal ellipse Hough transform for polarization compass in the nonideal atmosphere[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 5010108. doi: 10.1109/tim.2023.3256476 [18] 周钰聪, 叶超, 林子涵, 等. 复杂场景下偏振导航自适应图像分割算法[J]. 光学学报, 2024, 44(19): 1910002. doi: 10.3788/AOS240735ZHOU Y C, YE CH, LIN Z H, et al. Self-adaptive image segmentation algorithm for polarization navigation under complex scenes[J]. Acta Optica Sinica, 2024, 44(19): 1910002. (in Chinese). doi: 10.3788/AOS240735 [19] SHEN CH, WU Y CH, QIAN G Y, et al. Intelligent bionic polarization orientation method using biological neuron model for harsh conditions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025, 47(2): 789-806. doi: 10.1109/TPAMI.2024.3484183 [20] LIU X J, LIU J, HU P W, et al. A highly robust bionic polarization orientation method for night applications[J]. Chinese Journal of Aeronautics, 2026, 39(1): 103749. doi: 10.1016/j.cja.2025.103749 [21] MIRZAKHANI H. Interpretable machine learning-based algorithms for cardiac anomaly detection[D]. Turin: Politecnico di Torino, 2024. [22] 钟玉泉. 复变函数论[M]. 3版. 北京: 高等教育出版社, 2004.ZHONG Y Q. Theory of Functions of A Complex Variable[M]. 3rd ed. Beijing: Higher Education Press, 2004. (in Chinese)(查阅网上资料, 未找到本条文献英文翻译, 请确认). [23] CHARLOT P, JACOBS C S, GORDON D, et al. The third realization of the International Celestial Reference Frame by very long baseline interferometry[J]. Astronomy & Astrophysics, 2020, 644: A159. doi: 10.1051/0004-6361/202038368 -

 下载:
下载:

计量
- 文章访问数: 11
- HTML全文浏览量: 5
- PDF下载量: 0
- 被引次数: 0
