| Citation: | SHI Feng-hua, LI Long-xiang, LIU Xi-ming, PENG Li-rong, CHEN Hao, LI Xing-chang, CHENG Qiang, ZHANG Xue-jun. Multi-robot collaborative optical processing[J]. Chinese Optics. doi: 10.37188/CO.2025-0020

|
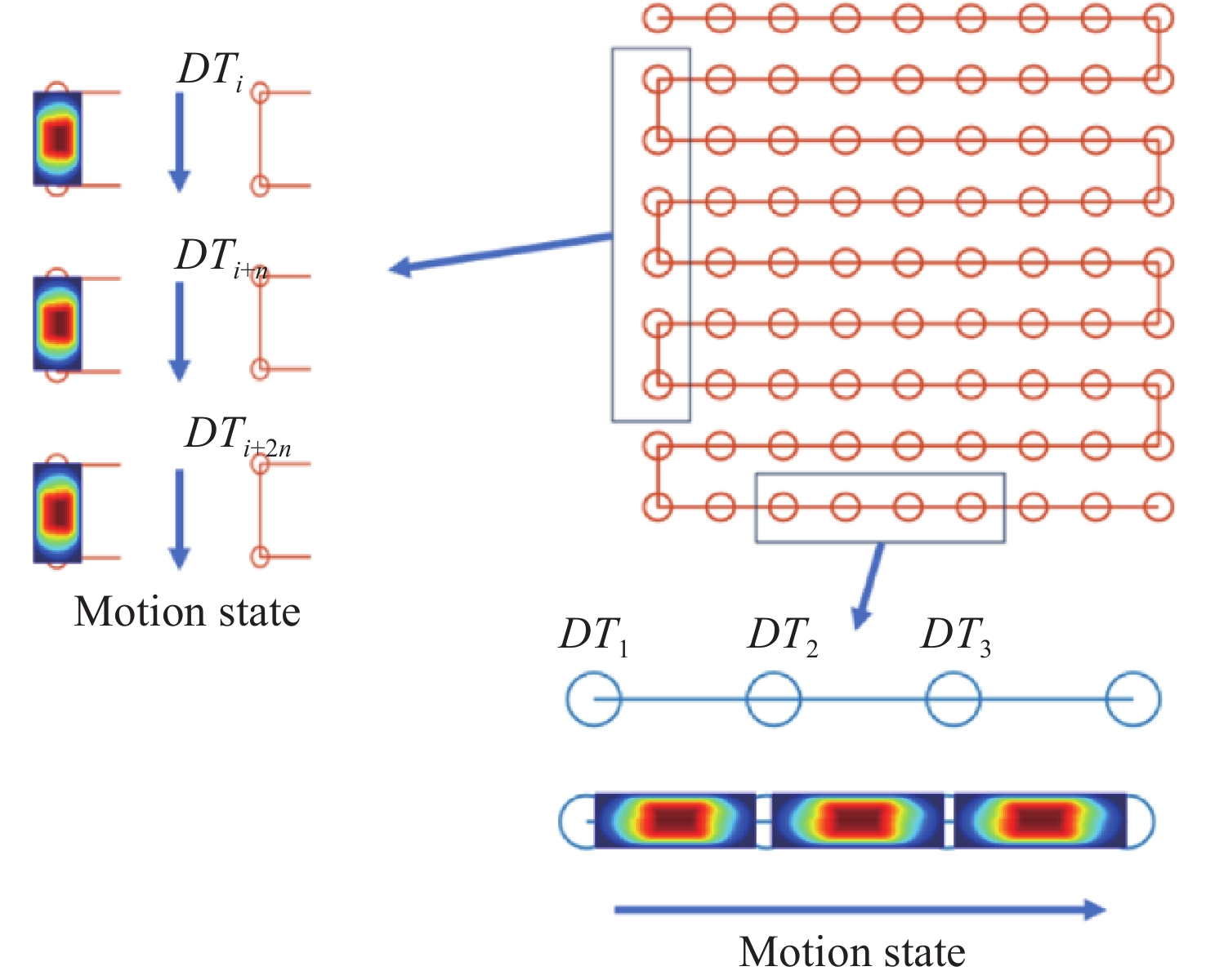
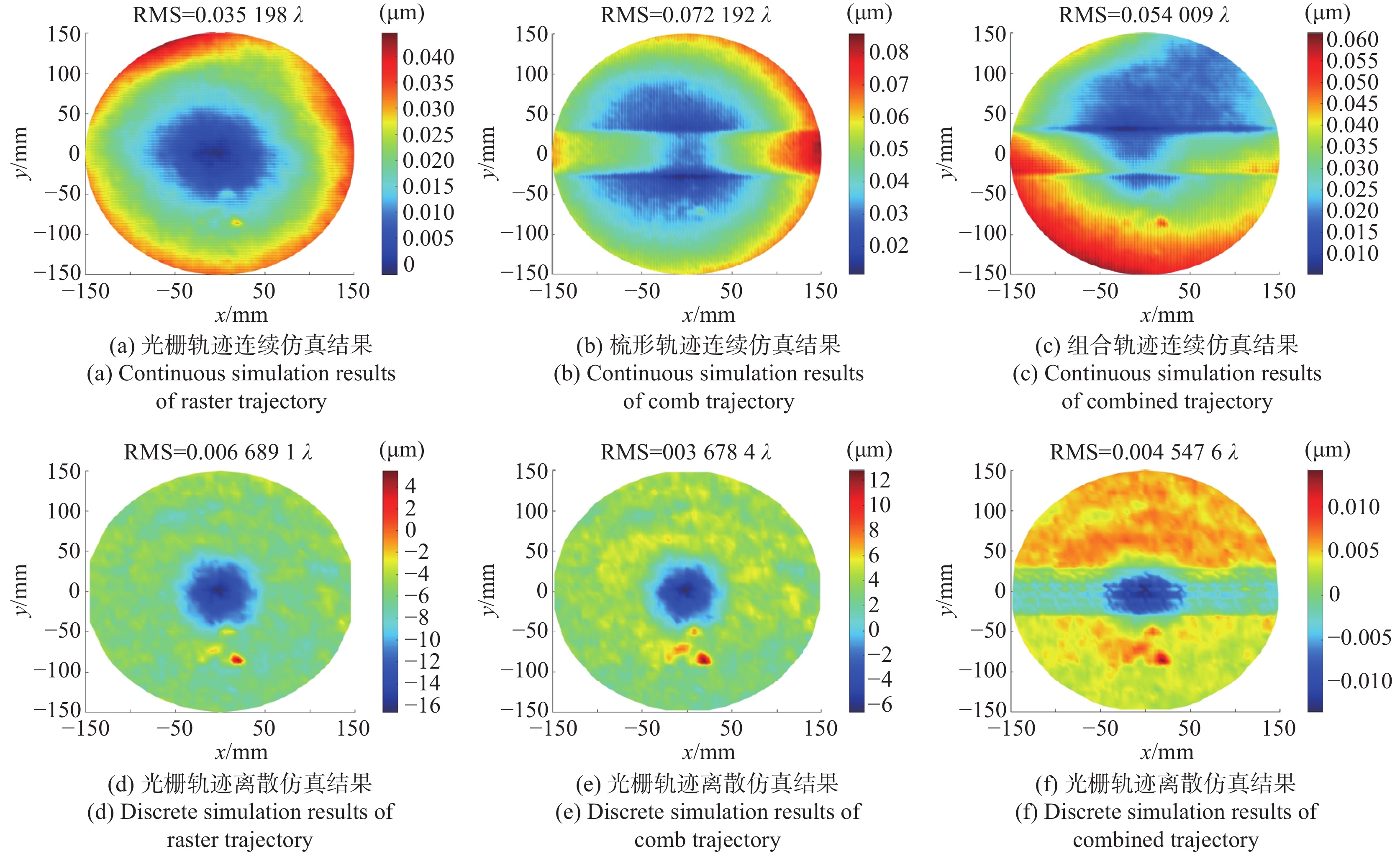
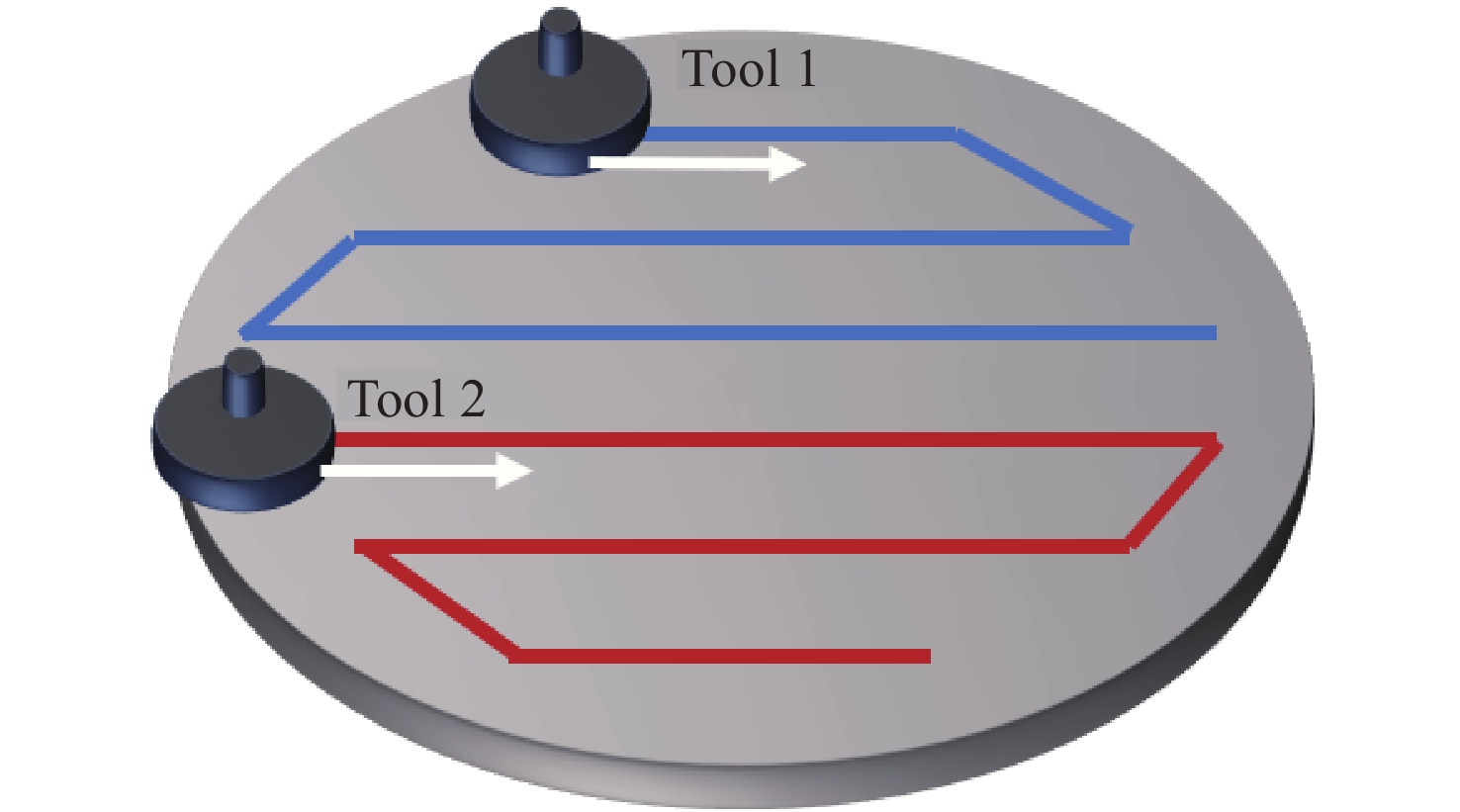
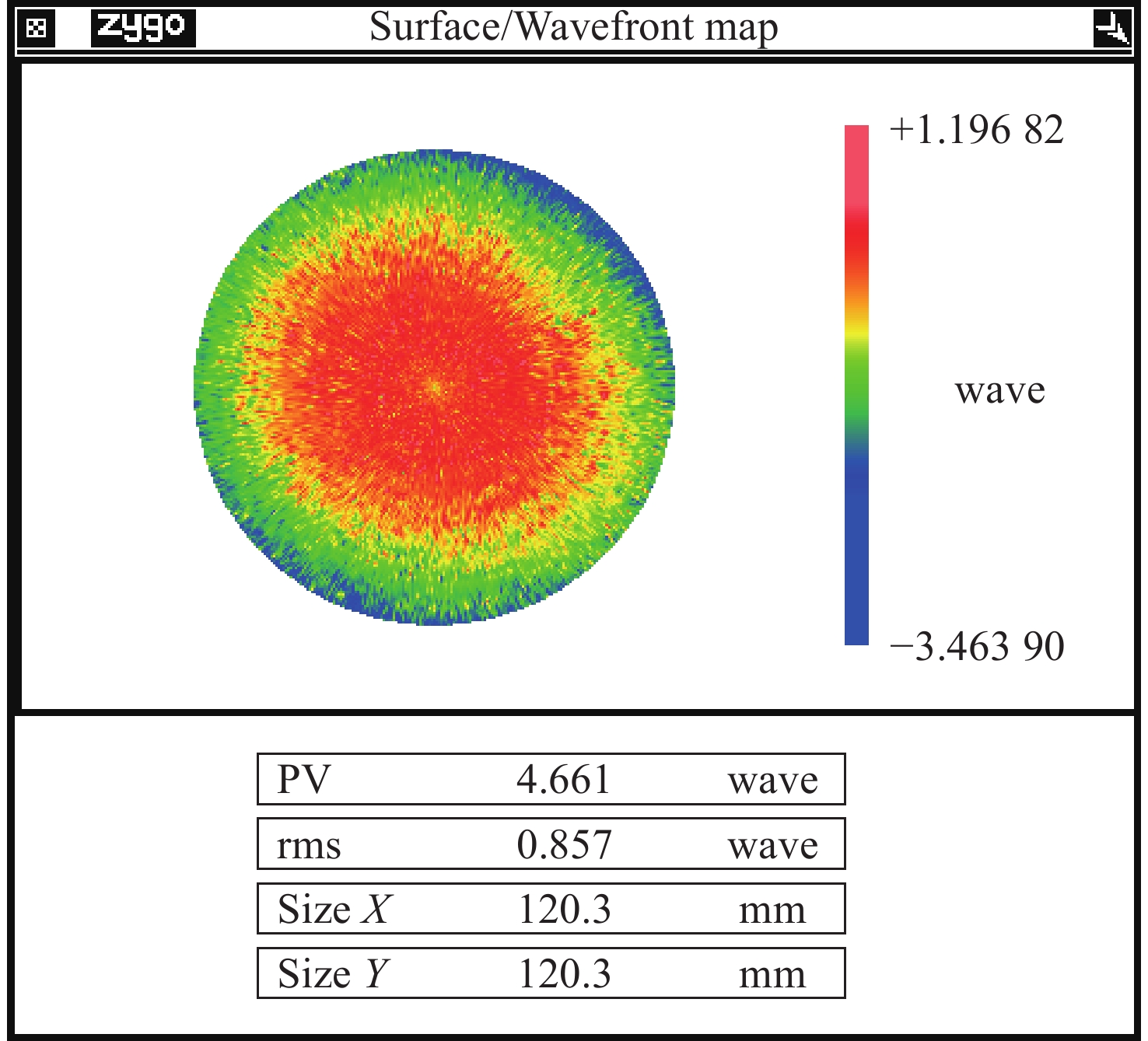
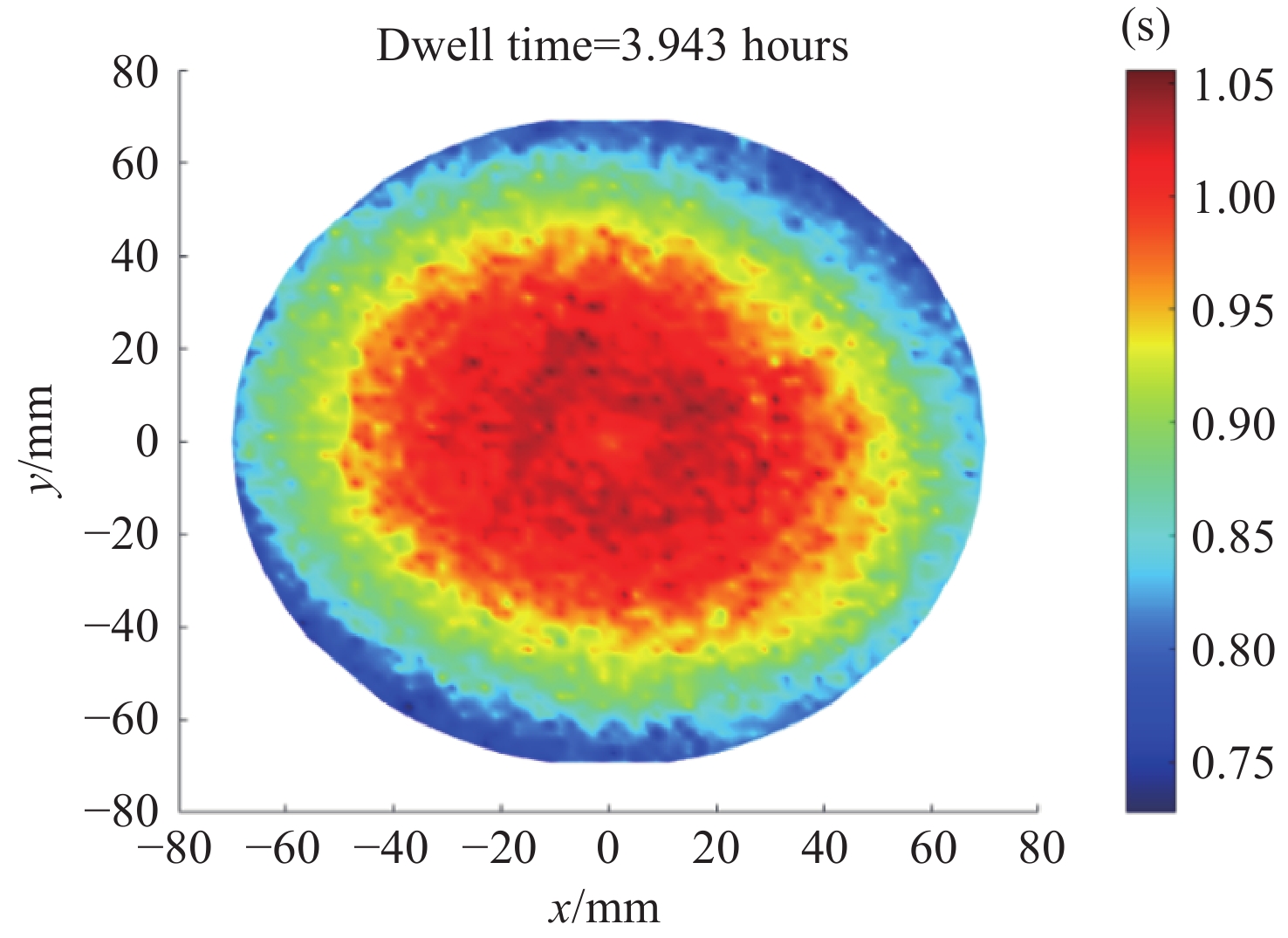
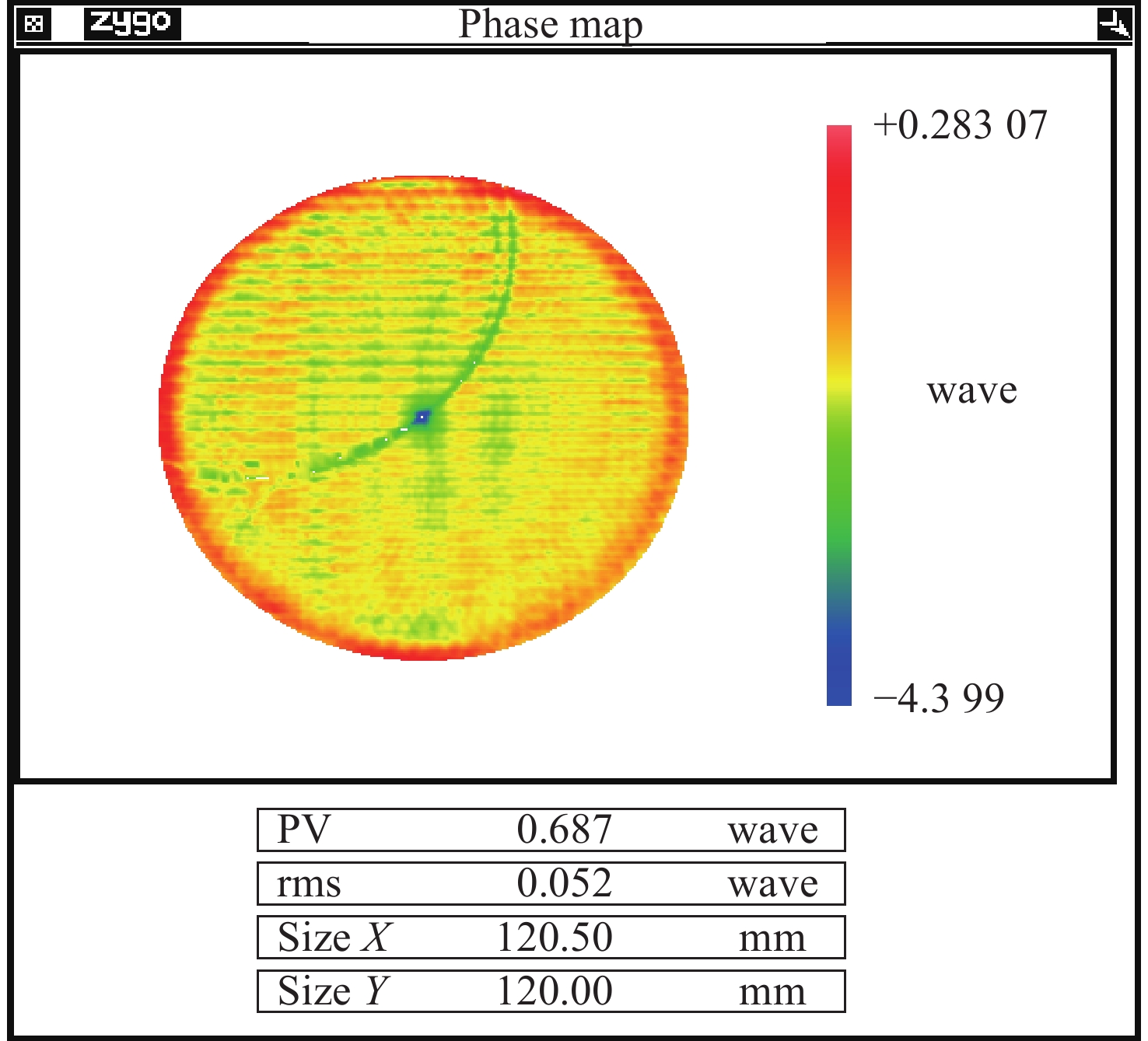
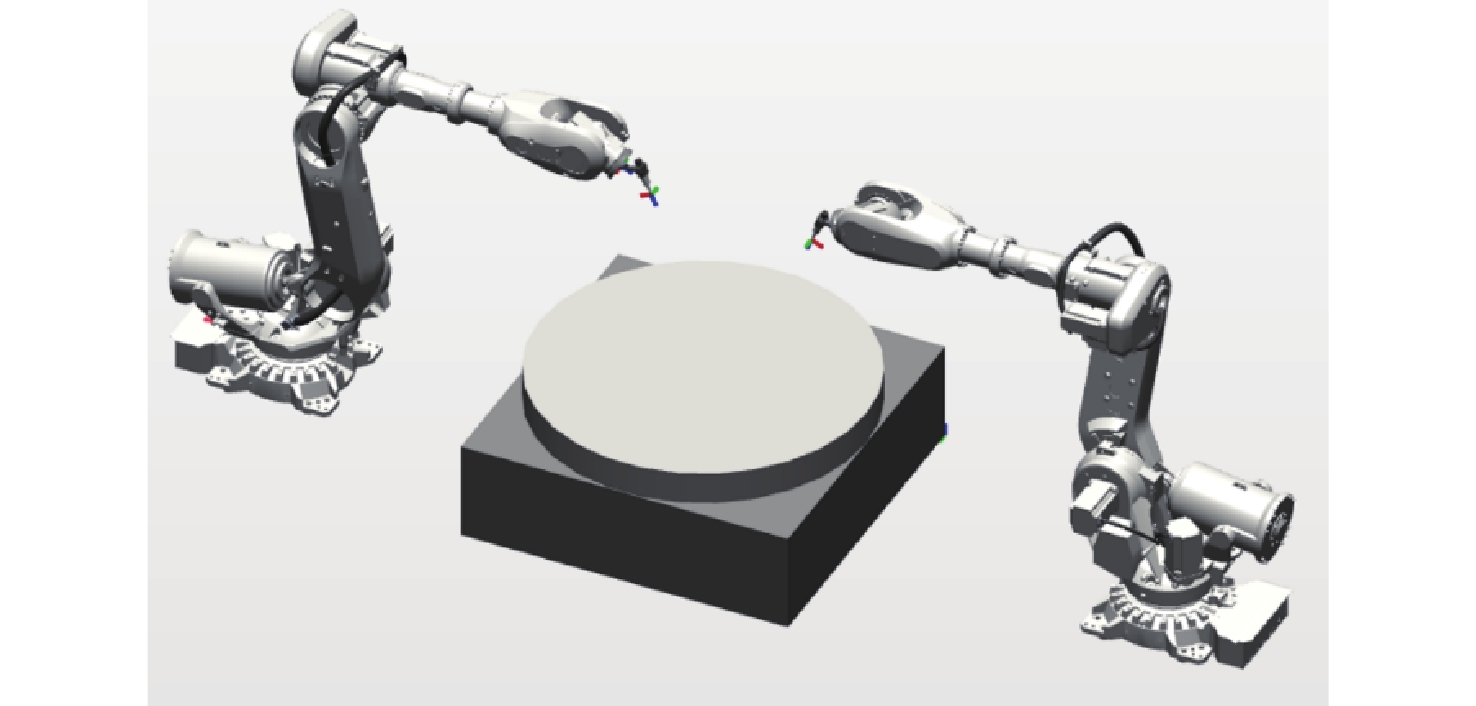
To improve the processing efficiency of large-aperture optical components, a multi-robot, multi-tool collaborative processing method was proposed. A collaborative layout that has been tailored to the optical components was designed, and three feasible trajectories were simulated for analysis. The discrete simulation results were then used to establish principles for selecting trajectory parameters. To address the limitation of discrete simulation in capturing the influence of trajectory continuity on the surface map, an integral removal function model adapted to the motion mode was introduced. Furthermore, a collaborative machining obstacle avoidance strategy was developed. The experimental results obtained using the optimal trajectory demonstrated that with an initial surface shape of PV=18.310λ (λ=632.8 nm) and RMS=1.788λ, the final surface achieved PV=4.873λ and RMS=1.113λ. In addition, within the effective range of 120 mm diameter, PV=4.661 λ, RMS=0.857λ, converged to PV=2.465λ and RMS=0.622λ after processing. The total execution time was 3.943 hours, with the maximum execution time for a single processing unit being 2.041 hours, representing a 1.93-fold improvement over single-tool processing. This method significantly enhances processing efficiency, ensures surface shape accuracy, and holds great potential for the manufacturing of large-aperture optical components.

| [1] |
STOCKMAN H S. James Webb space telescope[J]. Proceedings of the International Astronomical Union, 2006, 2: 522-523. doi: 10.1017/S1743921307011660
|
| [2] |
NOGUCHI K, ANDO H, IZUMIURA H, et al. High-dispersion spectrograph (HDS) for SUBARU telescope[J]. Proceedings of SPIE, 1998, 3355: 354-362. doi: 10.1117/12.316771
|
| [3] |
DINARDO F, TOMASI M, BURSI A, et al. Overview of the analysis and testing of a covering system for a telescope[C]. Proceedings of the 3rd International Symposium on Industrial Engineering and Automation, Springer, 2024: 216–224.
|
| [4] |
RANKA T, ASHBY D, CONAN R, et al. Performance analysis tools and results for GMT primary mirror segment active support system[J]. Proceedings of SPIE, 2018, 10705: 1070512.
|
| [5] |
DIERICKX P, ENARD D, MERKLE F, et al. 8.2 Metre primary mirrors of the VLT[J]. Proceedings of SPIE, 1990, 1271: 266-274. doi: 10.1117/12.20413
|
| [6] |
ZHANG X J, HU H X, WANG X K, et al. Challenges and strategies in high-accuracy manufacturing of the world's largest SiC aspheric mirror[J]. Light: Science & Applications, 2022, 11(1): 310.
|
| [7] |
JOHNS M, MCCARTHY P, RAYBOULD K, et al. Giant Magellan telescope: overview[J]. Proceedings of SPIE, 2012, 8444: 84441H.
|
| [8] |
LIU ZH Y, LI L X, QI E H, et al. Fabrication of a 4 m SiC aspheric mirror using an optimized strategy of dividing an error map[J]. Photonics, 2024, 11(2): 125. doi: 10.3390/photonics11020125
|
| [9] |
ZHOU J J, LI B, LI X N. Efficient full-aperture mirror polishing method with variable orbital radius in computer-controlled optical surfacing[J]. Optics Express, 2024, 32(13): 23865-23881. doi: 10.1364/OE.523657
|
| [10] |
BAI Y, ZHANG ZH Y, LI L X, et al. High precision polishing of aluminum alloy mirrors through a combination of magnetorheological finishing and chemical mechanical polishing[J]. Optics Express, 2024, 32(9): 15813-15826. doi: 10.1364/OE.519369
|
| [11] |
BAI Y, ZHANG X J, YANG CH, et al. Material removal model of magnetorheological finishing based on dense granular flow theory[J]. Light: Advanced Manufacturing, 2022, 3(4): 41.
|
| [12] |
WANG T Y, KE X L, HUANG L, et al. A comprehensive review of dwell time optimization methods in computer-controlled optical surfacing[J]. Light: Advanced Manufacturing, 2024, 5(3): 21.
|
| [13] |
刘振宇, 李龙响, 曾雪峰, 等. 大口径非球面反射镜误差分离组合加工技术[J]. 光学 精密工程,2017,25(4):813-819. doi: 10.3788/OPE.20172504.0813
LIU ZH Y, LI L X, ZENG X F, et al. Fabrication of large aspheric mirror using multi-mode polishing based on error separation[J]. Optics and Precision Engineering, 2017, 25(4): 813-819. (in Chinese). doi: 10.3788/OPE.20172504.0813
|
| [14] |
KE X L, WANG T Y, CHOI H, et al. Dual-tool multiplexing model of parallel computer controlled optical surfacing[J]. Optics Letters, 2020, 45(23): 6426-6429. doi: 10.1364/OL.404575
|
| [15] |
姚永胜. 基于工业机器人的轮式抛光技术研究[D]. 西安: 中国科学院大学(中国科学院西安光学精密机械研究所), 2023.
YAO Y SH. Research on technology of wheel polishing based on industrial robot[D]. Beijing: Xi’an Institute of Optics & Precision Mechanics, Chinese Academy of Sciences, 2023. (in Chinese).
|
| [16] |
李龙响. 大口径非球面磁流变加工的关键技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2016.
LI L X. Study on the key techniques of magnetorheological finishing for large aspheric optics[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2016. (in Chinese).
|
| [17] |
WAN S L, WEI CH Y, HU CH, et al. Novel magic angle-step state and mechanism for restraining the path ripple of magnetorheological finishing[J]. International Journal of Machine Tools and Manufacture, 2021, 161: 103673. doi: 10.1016/j.ijmachtools.2020.103673
|
| [18] |
LI H J, LI X Y, WAN S L, et al. High-efficiency smooth pseudo-random path planning for restraining the path ripple of robotic polishing[J]. Applied Optics, 2021, 60(25): 7732-7739. doi: 10.1364/AO.426616
|
| [19] |
LIU X M, LI L X, LI X CH, et al. Tool mark prediction on the surface of large-aperture mirrors via magnetorheological finishing[J]. Optics Express, 2024, 32(7): 11150-11170. doi: 10.1364/OE.517342
|
Figures(20) / Tables(1)


 DownLoad:
DownLoad: