| Citation: | REN Feng-lei, ZHOU Hai-bo, YANG Lu, HE Xin. Lane detection based on dual attention mechanism[J]. Chinese Optics, 2023, 16(3): 645-653. doi: 10.37188/CO.2022-0033

|
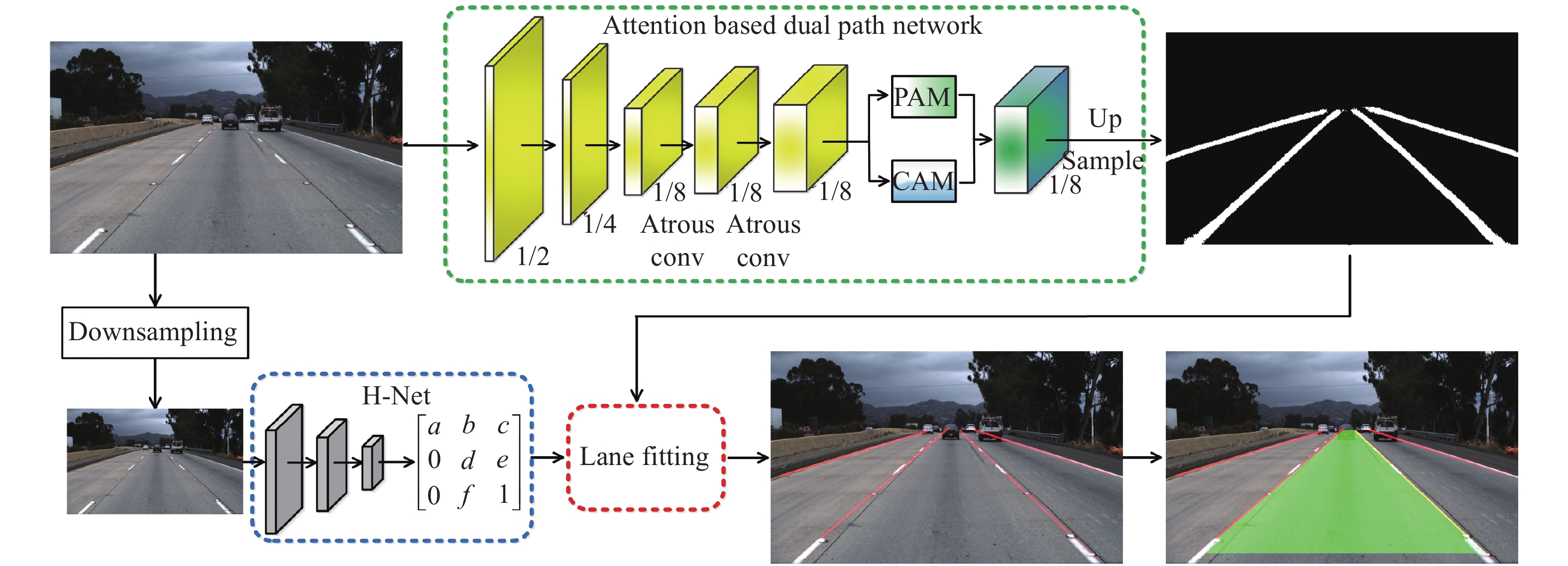
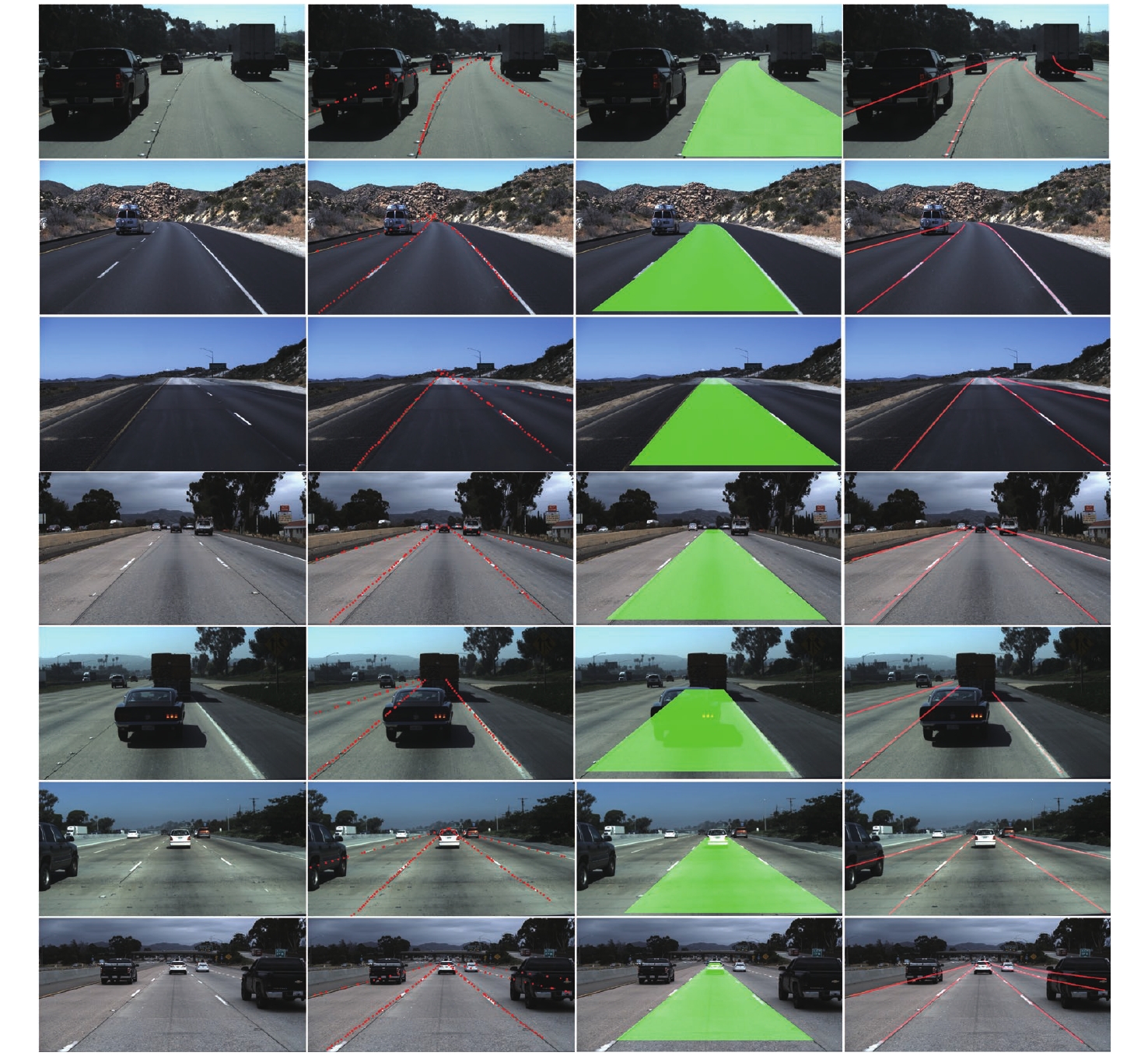
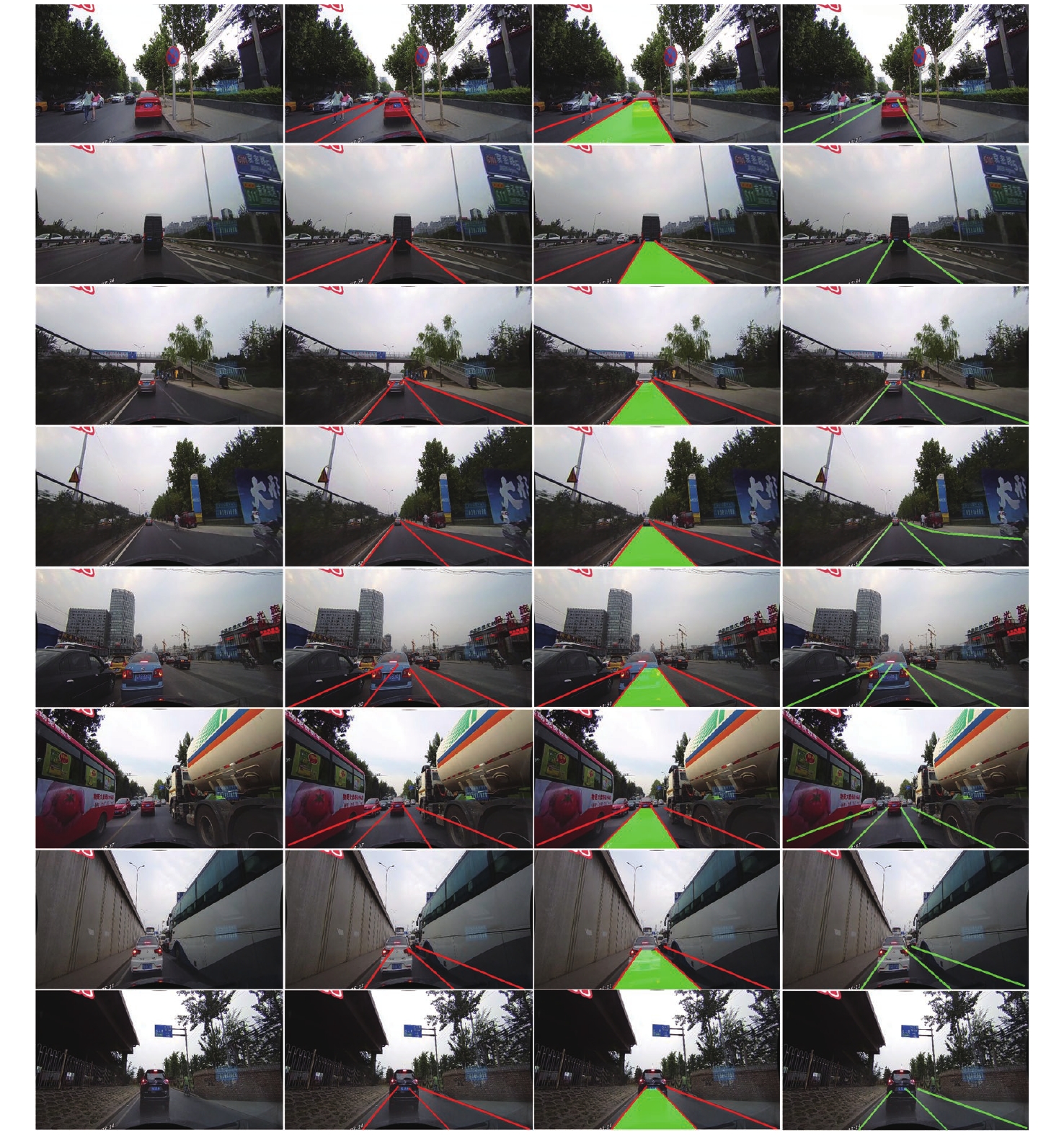
In order to improve the performance of lane detection algorithms under complex scenes like obstacles, we proposed a multi-lane detection method based on dual attention mechanism. Firstly, we designed a lane segmentation network based on a spatial and channel attention mechanism. With this, we obtained a binary image which shows lane pixels and the background region. Then, we introduced HNet which can output a perspective transformation matrix and transform the image to a bird’s eye view. Next, we did curve fitting and transformed the result back to the original image. Finally, we defined the region between the two-lane lines near the middle of the image as the ego lane. Our algorithm achieves a 96.63% accuracy with real-time performance of 134 FPS on the Tusimple dataset. In addition, it obtains 77.32% of precision on the CULane dataset. The experiments show that our proposed lane detection algorithm can detect multi-lane lines under different scenarios including obstacles. Our proposed algorithm shows more excellent performance compared with the other traditional lane line detection algorithms.

| [1] |
QIN Z Q, WANG H Y, LI X. Ultra fast structure-aware deep lane detection[C]. Proceedings of the 16th European Conference on Computer Vision, Springer, 2020: 276-291.
|
| [2] |
陈晓冬, 艾大航, 张佳琛, 等. Gabor滤波融合卷积神经网络的路面裂缝检测方法[J]. 中国光学,2020,13(6):1293-1301. doi: 10.37188/CO.2020-0041
CHEN X D, AI D H, ZHANG J CH, et al. Gabor filter fusion network for pavement crack detection[J]. Chinese Optics, 2020, 13(6): 1293-1301. (in Chinese) doi: 10.37188/CO.2020-0041
|
| [3] |
任凤雷, 何昕, 魏仲慧, 等. 基于DeepLabV3+与超像素优化的语义分割[J]. 光学 精密工程,2019,27(12):2722-2729. doi: 10.3788/OPE.20192712.2722
REN F L, HE X, WEI ZH H, et al. Semantic segmentation based on DeepLabV3+ and superpixel optimization[J]. Optics and Precision Engineering, 2019, 27(12): 2722-2729. (in Chinese) doi: 10.3788/OPE.20192712.2722
|
| [4] |
YU ZH P, REN X ZH, HUANG Y Y, et al. . Detecting lane and road markings at a distance with perspective transformer layers[C]. Proceedings of the 23rd International Conference on Intelligent Transportation Systems, IEEE, 2020: 1-6.
|
| [5] |
CHIU K Y, LIN S F. Lane detection using color-based segmentation[C]. Proceedings of the IEEE Intelligent Vehicles Symposium, IEEE, 2005: 706-711.
|
| [6] |
HUR J, KANG S N, SEO S W. Multi-lane detection in urban driving environments using conditional random fields[C]. Proceedings of 2013 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2013: 1297-1302.
|
| [7] |
JUNG H, MIN J, KIM J. An efficient lane detection algorithm for lane departure detection[C]. Proceedings of 2013 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2013: 976-981.
|
| [8] |
BORKAR A, HAYES M, SMITH M T. A novel lane detection system with efficient ground truth generation[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 365-374. doi: 10.1109/TITS.2011.2173196
|
| [9] |
VAN GANSBEKE W, DE BRABANDERE B, NEVEN D, et al. . End-to-end lane detection through differentiable least-squares fitting[C]. Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshop, IEEE, 2019: 905-913.
|
| [10] |
LIU T, CHEN ZH W, YANG Y, et al. . Lane detection in low-light conditions using an efficient data enhancement: light conditions style transfer[C]. Proceedings of 2020 IEEE Intelligent Vehicles Symposium, IEEE, 2020: 1394-1399.
|
| [11] |
CHANG D, CHIRAKKAL V, GOSWAMI S, et al. . Multi-lane detection using instance segmentation and attentive voting[C]. Proceedings of the 19th International Conference on Control, Automation and Systems, IEEE, 2020: 1538-1542.
|
| [12] |
KIM J, LEE M. Robust lane detection based on convolutional neural network and random sample consensus[C]. Proceedings of the 21st International Conference on Neural Information Processing, Springer, 2014: 454-461.
|
| [13] |
NEVEN D, DE BRABANDERE B, GEORGOULIS S, et al. . Towards end-to-end lane detection: an instance segmentation approach[C]. Proceedings of 2018 IEEE intelligent vehicles symposium (IV), IEEE, 2018: 286-291.
|
| [14] |
LEE H, SOHN K, MIN D. Unsupervised low-light image enhancement using bright channel prior[J]. IEEE Signal Processing Letters, 2020, 27: 251-255. doi: 10.1109/LSP.2020.2965824
|
| [15] |
YOO S, LEE H S, MYEONG H, et al. . End-to-end lane marker detection via row-wise classification[C]. Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, IEEE, 2020: 4335-4343.
|
| [16] |
FU J, LIU J, TIAN H J, et al. . Dual attention network for scene segmentation[C]. Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, 2019: 3141-3149.
|
| [17] |
HE K M, ZHANG X Y, REN SH Q, et al. . Deep residual learning for image recognition[C]. Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2016: 770-778.
|
| [18] |
PAN X G, SHI J P, LUO P, et al. . Spatial as deep: spatial CNN for traffic scene understanding[C]. Proceedings of the Thirty-Second AAAI Conference on Artificial Intelligence and Thirtieth Innovative Applications of Artificial Intelligence Conference and Eighth AAAI Symposium on Educational Advances in Artificial Intelligence, AAAI Press, 2018: 7276-7283.
|
| [19] |
CHEN ZH P, LIU Q F, LIAN CH F. PointLaneNet: efficient end-to-end CNNs for accurate real-time lane detection[C]. Proceedings of 2019 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2019: 2563-2568.
|
| [20] |
PHILION J. FastDraw: addressing the long tail of lane detection by adapting a sequential prediction network[C]. Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, IEEE, 2019: 11574-11583.
|
| [21] |
YOO S, LEE H S, MYEONG H, et al. . End-to-end lane marker detection via row-wise classification[C]. Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, IEEE, 2020: 4335-4343.
|
| [22] |
TABELINI L, BERRIEL R, PAIXÃO T M, et al. . Keep your eyes on the lane: Real-time attention-guided lane detection[C]. Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, IEEE, 2021: 294-302.
|
| [23] |
陈晓冬, 盛婧, 杨晋, 等. 多参数Gabor预处理融合多尺度局部水平集的超声图像分割[J]. 中国光学,2020,13(5):1075-1084. doi: 10.37188/CO.2020-0025
CHEN X D, SHENG J, YANG J, et al. Ultrasound image segmentation based on a multi-parameter Gabor filter and multiscale local level set method[J]. Chinese Optics, 2020, 13(5): 1075-1084. (in Chinese) doi: 10.37188/CO.2020-0025
|
| [24] |
周文舟, 范晨, 胡小平, 等. 多尺度奇异值分解的偏振图像融合去雾算法与实验[J]. 中国光学,2021,14(2):298-306. doi: 10.37188/CO.2020-0099
ZHOU W ZH, FAN CH, HU X P, et al. Multi-scale singular value decomposition polarization image fusion defogging algorithm and experiment[J]. Chinese Optics, 2021, 14(2): 298-306. (in Chinese) doi: 10.37188/CO.2020-0099
|

Figures(8) / Tables(2)



 DownLoad:
DownLoad: