


-
摘要: 检验质量是无拖曳航天器的惯性参考基准,对检验质量进行结构优化设计、材料选择以及不同配置方案的分析比较,能够为今后无拖曳航天任务中引力参考敏感器的模块化设计提供参考。本文首先分析了检验质量形状的取决要素和设计准则,以空间等效原理检验实验中圆柱体检验质量为例,建立了点质量引力源对检验质量的引力耦合模型,推导了检验质量形状尺寸的优化设计过程,并针对检验质量约束作用面和主惯性矩的特殊考量,分析了其对形状尺寸设计的影响。然后从最大化科学测量信号强度和最小化噪声扰动两方面对检验质量的材料进行选择,得到低磁化率、高密度、低热膨胀系数等属性的材料作为检验质量的备选。最后以空间引力波探测实验为例,从加速度噪声性能指标、方案继承性和技术成熟度、无拖曳控制复杂度等方面对检验质量的不同配置方案进行权衡取舍和比较研究。Abstract: As the gravitational reference object for drag-free spacecrafts, the structural optimal design, choice of material and related configuration comparisons of proof masses could provide information for gravitational reference sensors' modular designs in future spatial drag-free missions. Firstly, the determinants and design criteria of proof mass shape are discussed. The model of gravitational coupling between a point mass source and a cylindrical proof mass is established in test of the equivalence principle experiment. The optimization procedure for the structural dimension of proof masses is deduced in detail and the effects on structural design induced by special considerations for proof mass constraint surfaces and their principal moments of inertia are analyzed. Secondly, the choice of material for proof masses is determined by maximizing scientific measurement signal intensity and/or minimizing non-gravitational acceleration disturbance. Results show that materials with low magnetic susceptibility, high density and a low thermal expansion coefficient could be suitable. Finally, a trade-off study of several configurations of proof masses utilized in future space gravitational wave detection is performed from the following aspects:acceleration noise performance, flight heritage, technology maturity and drag-free control complexity.
-

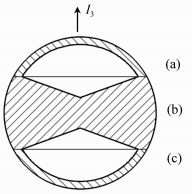
图 1 空间等效原理实验的检验质量示意图
Figure 1. Schematic of possible proof masses for test of equivalence principle in space

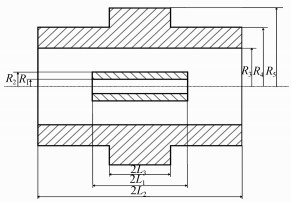
图 3 空心圆柱体检验质量与点质量引力源的相互作用
Figure 3. Gravitational interaction between a point source mass and the hollow cylindrical proof mass

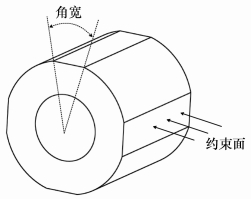
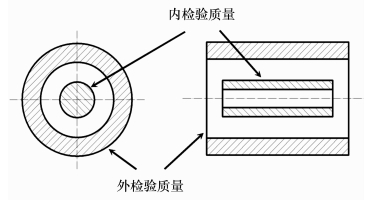
图 4 环带形/直圆柱体混合结构的检验质量
Figure 4. Proof masses with hybrid structure of ring-shaped/straight cylinder
表 1 无拖曳卫星应用实例及其检验质量形状
Table 1. Application examples of drag-free satellite and their proof mass shapes
科学任务 实例 检验质量形状 轨道预测 TRIAD I 球体 地球重力场测量 CHAMP、GRACE、GOCE 立方体 等效原理检验 MICROSCOPE 圆柱体 广义相对论效应测量 GP-B 球体 引力波探测 LISA Pathfinder 立方体  下载: 导出CSV
下载: 导出CSV
表 2 LISA检验质量的4种配置方案
Table 2. Four configurations of LISA proof mass
配置方案1 配置方案2 配置方案3 配置方案4 检验质量构型示意图 



检验质量形状 立方体 立方体 球体 球体 每个航天器中检验质量个数 2 1 1 1 是否主动控制检验质量旋转 否 否 是 否 检验质量相对运动状态测量系统 静电测量+光学测量 光学测量 光学测量 光学测量 检验质量是否需要静电悬浮 是 是 否 否
下载: 导出CSV
表 3 LISA不同配置方案中总的加速度噪声比较
Table 3. Comparison of the total acceleration noises for four LISA configurations
加速度噪声δa/(10-16ms-2Hz-1/2) 方案1 方案2 方案3 方案4 环境噪声δaenv 10.7 10.7 8.49 8.49 刚度相关的噪声δastiff 5.75 1.17 0.15 6.0 静电悬浮系统引入的噪声δaf 10.8 2.15 无 无 传感器引入的噪声δas 3.88 3.88 可忽略 可忽略 总的加速度扰动δatotal 16.7 11.64 8.5 10.4 附注:  下载: 导出CSV
下载: 导出CSV
表 4 LISA不同配置方案中控制自由度数量比较
Table 4. Control DOF count comparison for four LISA configurations
自由度数量 方案1 方案2 方案3/4 单个航天器 平动 9 6 6 转动 9 6 3 其它 1 1 1 三个航体器总计 57 39 30 控制矩阵维数 57×57 39×39 30×30
下载: 导出CSV
-
[1] CONKLIN J W, BALAKRISHNAN K, BUCHMAN S, et al.. The drag-free CubeSat[C]. Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, AIAA, 2012. [2] 罗子人, 白姗, 边星, 等.空间激光干涉引力波探测[J].力学进展, 2013, 43(4):415-447. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201304003LUO Z R, BAI SH, BIAN X, et al.. Gravitational wave detection by space laser interferometry[J]. Advances in Mechanics, 2013, 43(4):415-447.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201304003 [3] SUMNER T J. The STEP and GAUGE missions[J]. Space Science Reviews, 2009, 148(1-4):475-487. doi: 10.1007/s11214-009-9558-x [4] EVERITT C W F, DEBRA D B, PARKINSON B W, et al.. Gravity Probe B:final results of a space experiment to test general relativity[J]. Physical Review Letters, 2011, 106(22):221101. doi: 10.1103/PhysRevLett.106.221101 [5] CIUFOLINI I, PAOLOZZI A, PAVLIS E C, et al.. A test of general relativity using the LARES and LAGEOS satellites and a GRACE earth gravity model[J]. The European Physical Journal C, 2016, 76(3):120. doi: 10.1140/epjc/s10052-016-3961-8 [6] REIGBER C, LVHR H, SCHWINTZER P. CHAMP mission status[J]. Advances in Space Research, 2002, 30(2):129-134. doi: 10.1016/S0273-1177(02)00276-4 [7] CHRISTOPHE B, BOULANGER D, FOULON B, et al.. A new generation of ultra-sensitive electrostatic accelerometers for GRACE Follow-on and towards the next generation gravity missions[J]. Acta Astronautica, 2015, 117:1-7. doi: 10.1016/j.actaastro.2015.06.021 [8] DRINKWATER M R, FLOBERGHAGEN R, HAAGMANS R, et al.. VⅡ:CLOSING SESSION:GOCE: ESA's first earth explorer core mission[J]. Space Science Reviews, 2003, 108(1-2):419-432. http://d.old.wanfangdata.com.cn/Periodical/xmdxxb201606005 [9] BENDER P, BRILLET A, CIUFOLINI I, et al.. LISA pre-phase A report[R]. Hannover: LISA Study Team, 1998. [10] LANGE B. Drag-free performance in a LISA mission with spherical proof masses[J]. Classical and Quantum Gravity, 2002, 19(7):1739-1743. doi: 10.1088/0264-9381/19/7/369 [11] LANGE B. Preliminary studies of spherical proof masses in LISA drag-free satellites[J]. Proceedings of SPIE, 2003, 4856:107-115. doi: 10.1117/12.458562 [12] CONNES A, DAMOUR T, FAYET P. A spherical gravitational monopoles[J]. Nuclear Physics B, 1997, 490(1-2):391-431. doi: 10.1016/S0550-3213(97)00041-2 [13] SUMNER T J, ANDERSON J, BLASER J P, et al.. STEP(satellite test of the equivalence principle)[J]. Advances in Space Research, 2007, 39(2):254-258. doi: 10.1016/j.asr.2006.09.019 [14] TOUBOUL P, RODRIGUES M, MÉTRIS G, et al.. MICROSCOPE, testing the equivalence principle in space[J]. Comptes Rendus de l'Académie des Sciences-Series IV-Physics, 2001, 2(9):1271-1286. doi: 10.1016/S1296-2147(01)01264-1 [15] NOBILI A M, COMANDI G L, DORAVARI S, et al.. "Galileo Galilei"(GG) a small satellite to test the equivalence principle of Galileo, Newton and Einstein[J]. Experimental Astronomy, 2009, 23(2):689-710. doi: 10.1007/s10686-008-9128-3 [16] 罗子人, 钟敏, 边星, 等.地球重力场空间探测:回顾与展望[J].力学进展, 2014, 44:201408. doi: 10.6052/1000-0992-14-047LUO Z R, ZHONG M, BIAN X, et al.. Mapping earth's gravity in space:review and future perspective[J]. Advances in Mechanics, 2014, 44:201408.(in Chinese) doi: 10.6052/1000-0992-14-047 [17] SWANK A J. Gravitational mass attraction measurement for drag-free references[D]. Palo Alto: Stanford University, 2009. [18] Staff of the Space Department, Staff of the Guidance, Control Laboratory. A satellite freed of all but gravitational forces:"TRIAD I"[J]. Journal of Spacecraft and Rockets, 1974, 11(9):637-644. doi: 10.2514/3.62146 [19] BENCZE W J, BRUMLEY R W, EGLINGTON M L, et al.. The Gravity Probe B electrostatic gyroscope suspension system GSS)[J]. Classical and Quantum Gravity, 2015, 32(22):224005. doi: 10.1088/0264-9381/32/22/224005 [20] RACCA G D, MCNAMARA P W. The LISA pathfinder mission[J]. Space Science Reviews, 2010, 151(1-3):159-181. doi: 10.1007/s11214-009-9602-x [21] LOCKERBIE N A, XU X, VERYASKIN A V, et al.. Optimization of immunity to helium tidal influences for the STEP experiment test masses[J]. Classical and Quantum Gravity, 1994, 11(6):1575-1590. doi: 10.1088/0264-9381/11/6/021 [22] LOCKERBIEN A, XU X, VERYASKIN A V. The gravitational coupling between longitudinal segments of a hollow cylinder and an arbitrary gravitational source:relevance to the STEP experiment[J]. Classical and Quantum Gravity, 1996, 13(8):2041-2059. doi: 10.1088/0264-9381/13/8/004 [23] CONKLIN J W, ALLEN G, SUN K X, et al.. Determination of spherical test mass kinematics with modular gravitational reference sensor[J]. Journal of Guidance Control and Dynamics, 2008, 31(6):1700-1707. doi: 10.2514/1.34230 [24] DOLPHIN M D M. Polhode dynamics and gyroscope asymmetry analysis on Gravity Probe B using gyroscope position data[D]. Palo Alto: Stanford University, 2007. [25] CONKLIN J W. Estimation of the mass center and dynamics of aspherical test mass for gravitational reference sensors[D]. Palo Alto: Stanford University, 2008. [26] BLASER J P. Test mass material selection for equivalence principle experiments[J]. Classical and Quantum Gravity, 2001, 18(13):2515-2520. doi: 10.1088/0264-9381/18/13/314 [27] DANZMANN K, RVDIGER A. LISA technology-concept, status, prospects[J]. Classical and Quantum Gravity, 2003, 20(10):S1-S9. doi: 10.1088/0264-9381/20/10/301 [28] SWANSON P N, EVERITT C W F, LEE M C. The NASA/ESA MiniSTEP project[J]. Advances in Space Research, 2003, 32(7):1373-1377. doi: 10.1016/S0273-1177(03)90348-6 [29] OVERDUIN J, EVERITT F, MESTER J, et al.. The science case for STEP[J]. Advances in Space Research, 2009, 43(10):1532-1537. doi: 10.1016/j.asr.2009.02.012 [30] TOUBOUL P, MÉTRIS G, RODRIGUES M, et al.. MICROSCOPE mission:first results of a space test of the equivalence principle[J]. Physical Review Letters, 2017, 119(23):231101. doi: 10.1103/PhysRevLett.119.231101 [31] SCHUMAKER B L. Disturbance reduction requirements for LISA[J]. Classical and Quantum Gravity, 2003, 20(10):S239-S253. doi: 10.1088/0264-9381/20/10/327 [32] ZANONI C, ALFAUWAZ A, ALJADAAN A, et al.. The design of a drag-free CubeSat and the housing for its gravitational reference sensor[C]. Proceedings of the 2nd IAA Conference on University Satellites Missions and CubeSat Workshop, IAA, 2013. [33] ALLEN G S. Optical sensor design for advanced drag-free satellites[D]. Palo Alto: Stanford University, 2009. [34] BALAKRISHNAN K, SUN K X, ALFAUWAZ A, et al.. UV LED charge control of an electrically isolated proof mass in a gravitational reference sensor configuration at 255 nm[C]. Proceedings of the Latin America Optics and Photonics Conference 2014, OSA, 2014. [35] LIPA J A, KEISER G M. The Stanford Relativity Gyroscope Experiment(B):Gyroscope Development[M]. New York:W. H. Freeman and Co., 1988, 1:587-699. [36] AMARO-SEOANE P, AUDLEY H, BABAK S, et al.. Laser interferometer space antenna[J]. Tp.umu.se, 2017, 548(3):411. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0225103032/ [37] BUCHMAN S, CONKLIN J W, BALAKRISHNAN K, et al.. LAGRANGE: laser gravitational-wave antenna in geodetic orbit[C]. Proceedings of the 9th LISA Symposium, LISA, 2012. [38] ANDO M, KAWAMURA S, SETO N, et al.. DECIGO and DECIGO pathfinder[J]. Classical and Quantum Gravity, 2010, 27(8):084010. doi: 10.1088/0264-9381/27/8/084010 [39] HU W R, WU Y L. The Taiji program in space for gravitational wave physics and the nature of gravity[J]. National Science Review, 2017, 4(5):685-686. doi: 10.1093/nsr/nwx116 [40] LUO J, CHEN L SH, DUAN H Z, et al.. Tianqin:a space-borne gravitational wave detector[J]. Classical and Quantum Gravity, 2016, 33(3):035010. doi: 10.1088/0264-9381/33/3/035010 [41] CROWDER J, CORNISH N J. Beyond LISA:exploring future gravitational wave missions[J]. Physical Review D, 2005, 72(8):083005. doi: 10.1103/PhysRevD.72.083005 [42] SUN K X, BUCHMAN S, BYER R, et al.. Modular gravitational reference sensor development[J]. Journal of Physics:Conference Series, 2009, 154(1):012026. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000001528214 [43] GERARDI D, ALLEN G, CONKLIN J W, et al.. Invited article: advanced drag-free concepts for future space-based interferometers:acceleration noise performance[J]. Review of Scientific Instruments, 2014, 85(1):011301. doi: 10.1063/1.4862199 [44] TOUBOUL P, MÉTRIS G, SÉLIG H, et al.. Gravitation and geodesy with inertial sensors, from ground to space[J]. Aerospace Lab Journal, 2016(12):AL12-11. http://cn.bing.com/academic/profile?id=d6f2cd51d4d1251f9756ff701510ac9a&encoded=0&v=paper_preview&mkt=zh-cn [45] DEBRA D B. Drag-free spacecraft as platforms for space missions and fundamental physics[J]. Classical and Quantum Gravity, 1997, 14(6):1549-1555. doi: 10.1088/0264-9381/14/6/026 [46] BUCHMAN S, EVERITT C W F, PARKINSON B, et al.. Gyroscopes and charge control for the relativity mission Gravity Probe B[J]. Advances in Space Research, 2000, 25(6):1181-1184. doi: 10.1016/S0273-1177(99)00983-7 -

 下载:
下载:


计量
- 文章访问数: 2619
- HTML全文浏览量: 804
- PDF下载量: 239
- 被引次数: 0
