


-
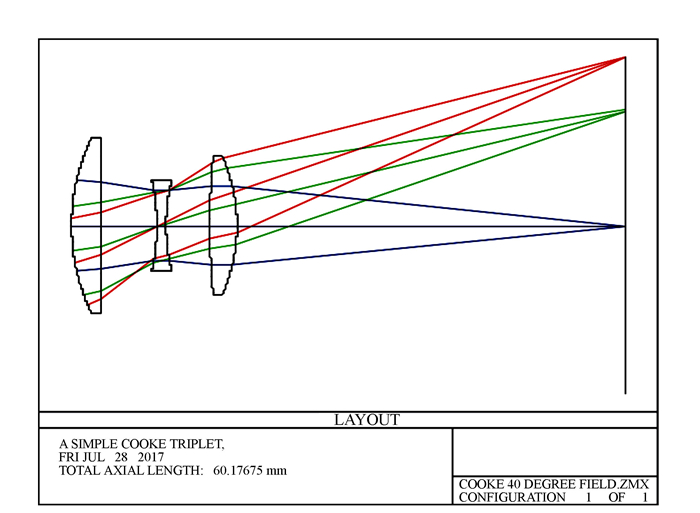
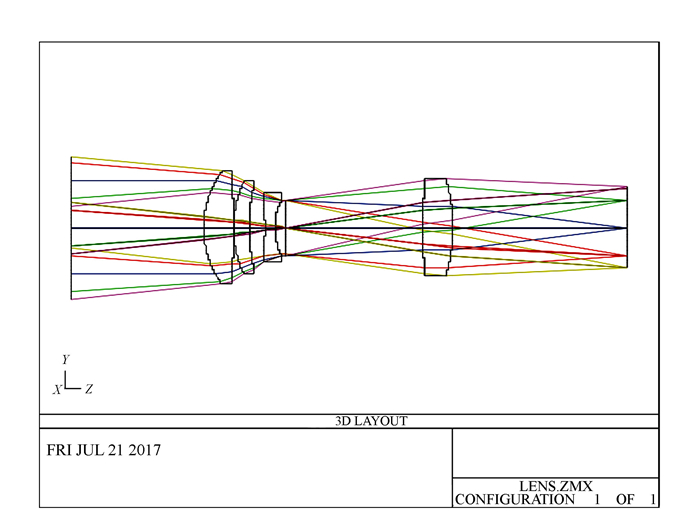
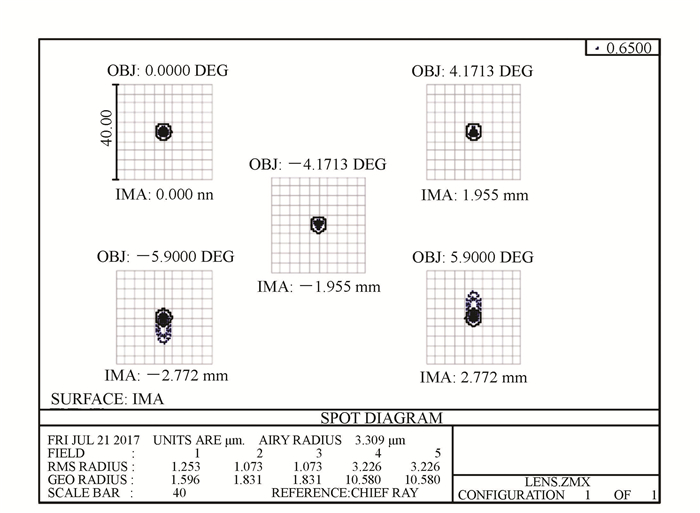
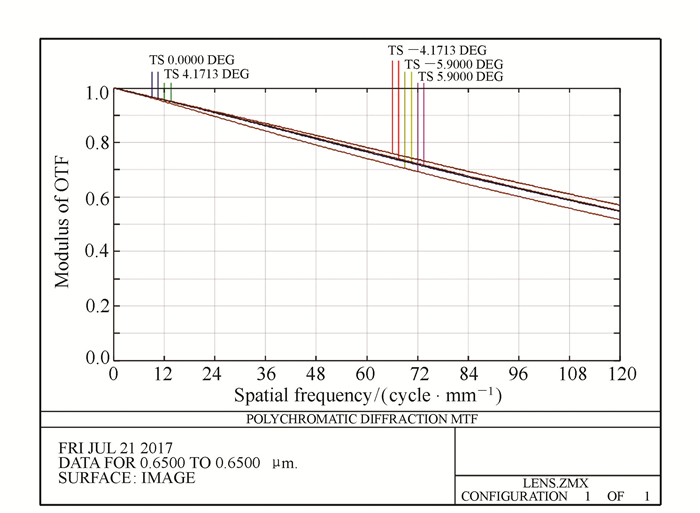
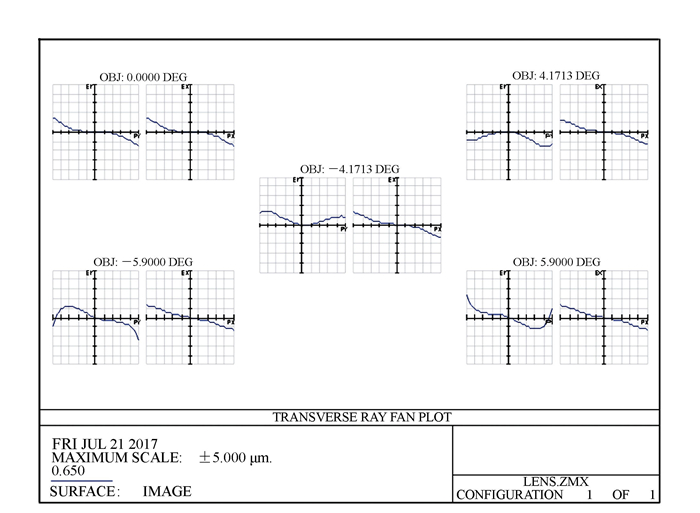
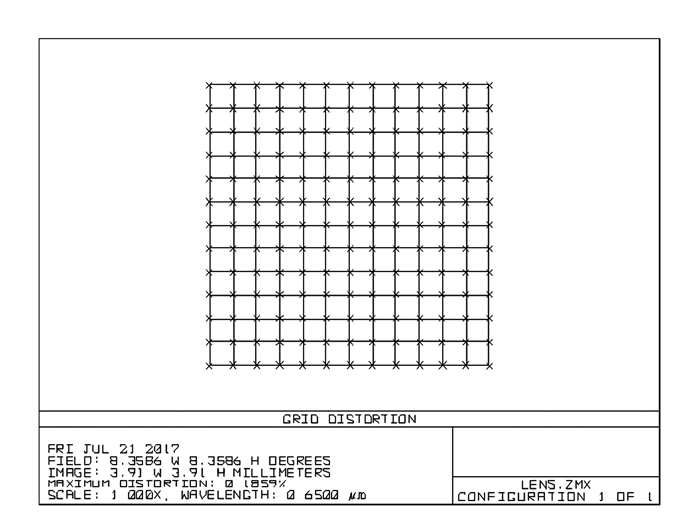
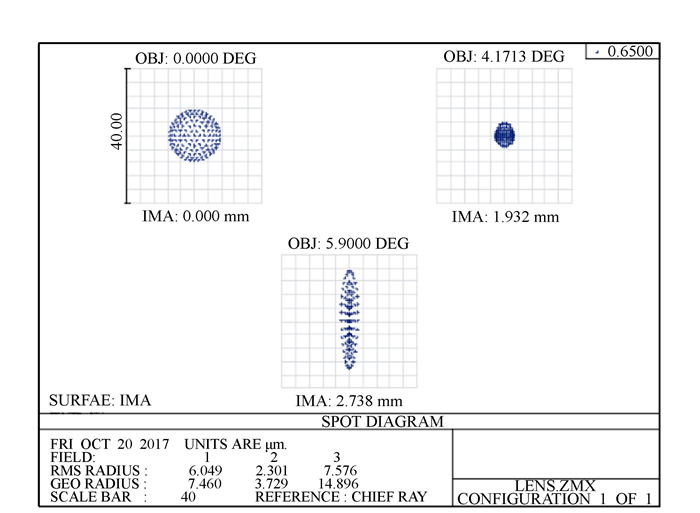
摘要: 光斑质量直接影响激光位移传感器测量的精度。为了提高激光位移传感器传感探头光学系统的成像质量,设计了传感探头四片式微小型光学系统。本文在理想成像基础上,分析光束在光学系统中能量传递的变化规律,对比光电探测器的感光能力,利用光学设计软件(ZEMAX)实现了激光位移传感器传感探头微小型光学系统的设计。通过理论计算分析,严格控制传感探头孔径光阑的大小,对光学系统进行优化处理,成像最大弥散斑半径低于3.3 μm,空间分辨率120 lp/mm以下的传递函数MTF(Modulation Transfer Function)值大于0.5,光线扇形图的最大像差小于5 μm,畸变量低于0.1859%。该光学系统具有良好的成像效果,可以满足激光位移传感器探测系统对成像系统成像光斑质量的要求,以保证传感器的测量精确度优于5 μm。Abstract: Spot quality can directly affect the measuring accuracy of laser displacement sensor. In order to improve the imaging quality of sensing probe optical system for the laser displacement sensor, a four-piece micro-optical system for sensing probes is designed. Based on the ideal imaging, we analyze the law of energy transfer in the optical system, compare the sensitivity of the photoelectric detector, and use the optical design software ZEMAX to realize the design of the micro-optical system of the laser displacement sensor. Through theoretical calculation and analysis, the size of the aperture of the sensing probe is strictly controlled, and the optical system is optimized. As a result, the maximum radius of spot is 3.226 μm, the value of Modulation Transfer Function(MTF) is over 0.5 when the spatial resolution is confined within the boundary of 120 lp/mm, the error of Ray Fan is 5 μm or less and the maximum distortion is less than 0.185 9%. The optical system has a good imaging effect, so that the laser displacement sensor detection system can meet the imaging spot quality requirements of the imaging system to ensure that the measurement accuracy of the sensor is better than 5 μm.
-
Key words:
- micro-optical system /
- ZEMAX /
- spot quality
-
表 1 探测器规格参数
Table 1. Specifications of photodetector
探测器型号 TCD1707D 像元尺寸x/μm 4.7 像元个数m 7 450 最小曝光量SE(lx.s) 0.08  下载: 导出CSV
下载: 导出CSV
表 2 激光器规格参数
Table 2. Specifications of laser
激光器型号 K650E03SN-0.010W 波长λ/nm 650 功率P/mW 10 光束整形后光斑直径d/μm 105
下载: 导出CSV
表 3 结构设计参数表
Table 3. Design data of optical system
Surf: Type(Standard) Radius Thickness Glass Semi-Diameter OBJ Infinity Infinity Infinity 1 Infinity 9.180 4.958 2 6.594 2.052 H-BAK6 3.879 3 -83.870 0.013 3.658 4 7.518 1.080 H-BAK6 3.202 5 12.836 1.083 2.841 6 -20.960 0.689 ZF1 2.370 7 4.259 0.726 1.945 STO 9.525 1.899 9 109.876 2.050 H-BAK6 3.222 10 -11.405 12.058 3.344 IMA Infinity - 2.783
下载: 导出CSV
-
[1] 庄松林, 肖中汉.我国仪器仪表与测量控制科技的发展[J].自动化仪表, 2009, 30(5):1-6. doi: 10.3969/j.issn.1000-0380.2009.05.001ZHUANG S L, XIAO ZH H. Development of science and technology in this instrumentation, measurement and control area of China[J]. Chinese Journal of Scientific Instrument, 2009, 30(5):1-6.(in Chinese) doi: 10.3969/j.issn.1000-0380.2009.05.001 [2] 李兵, 孙彬, 陈磊, 等.激光位移传感器在自由曲面测量中的应用[J].光学精密工程, 2015, 23(7):1939-1947. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201507017LI B, SUN B, CHEN L, et al.. Application of laser displacement sensor to free-form surface measurement[J]. Opt. Precision Eng., 2015, 23(7):1939-1947.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201507017 [3] IBARAKI S, KITAGAWA Y, KIMURA Y, et al.. On the limitation of dual-view triangulation in reducing the measurement error induced by the speckle noise in scanning operations[J]. International Journal of Advanced Manufacturing Technology, 2017, 88(1-4):731-737. doi: 10.1007/s00170-016-8787-x [4] LEE R T, SHIOU F J. Multi-beam laser probe for measuring position and orientation of freeform surface[J]. Measurement, 2011, 44(1):1-10. doi: 10.1016/j.measurement.2010.05.005 [5] 杨博, 张加宏, 李敏, 等.基于ARM的多通道数据采集系统[J].仪表技术与传感器, 2015(2):104-107. doi: 10.3969/j.issn.1002-1841.2015.02.033YANG B, ZHANG J H, LI M, et al.. Design of multi-channel data acquisition system based on ARM[J]. Instrument Technique and Sensor, 2015(2):104-107.(in Chinese) doi: 10.3969/j.issn.1002-1841.2015.02.033 [6] 陈振娇, 徐新宇, 张猛华.EDMA数据传输方式在视频图像处理系统中的应用[J].电子与封装, 2015(4):28-31. doi: 10.3969/j.issn.1681-1070.2015.04.008CHEN ZH J, XU X Y, ZHANG M H, et al.. Data transfers by EDMA in video image processing system[J]. Electronics & Packaging, 2015(4):28-31.(in Chinese) doi: 10.3969/j.issn.1681-1070.2015.04.008 [7] 陈祎平.基于嵌入式操作系统的移动终端图像处理系统[D].南京: 南京邮电大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10293-1016303268.htmCHEN Y P. Image processing system of mobile terminal based on embedded operating system[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2016.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10293-1016303268.htm [8] 李豫东, 汪波, 郭旗, 等.CCD与CMOS图像传感器辐射效应测试系统[J].光学精密工程, 2013, 21(11):2778-2784. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201311007LI Y D, WANG B, GUO Q, et al.. Testing system for radiation effects of CCD and CMOS image sensors[J]. Opt. Precision Eng., 2013, 21(11):2778-2784.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201311007 [9] 姚立斌.低照度CMOS图像传感器技术[J].红外技术, 2013, 35(3):125-132. http://d.old.wanfangdata.com.cn/Periodical/hwjs201303003YAO L B. Low-light-level CMOS image sensor technique[J]. Infrared Technology, 2013, 35(3):125-132.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwjs201303003 [10] 罗通顶, 李斌康, 郭明安, 等.科学级CCD远程图像采集系统[J].光学精密工程, 2013, 21(2):496-502. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201302034LUO T D, LI B K, GUO M A, et al.. Remote image acquisition system with scientific grade CCD[J]. Opt. Precision Eng., 2013, 21(2):496-502.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201302034 [11] 陈骥, 王鑫, 曹久大, 等.高速CCD激光位移传感器[J].光学精密工程, 2008, 16(4):611-616. doi: 10.3321/j.issn:1004-924X.2008.04.008CHEN J, WANG X, CAO J D, et al.. Development of high-speed CCD laser displacement sensor[J]. Opt. Precision Eng., 2008, 16(4):611-616.(in Chinese) doi: 10.3321/j.issn:1004-924X.2008.04.008 [12] 邾继贵, 陈浩, 薛彬.基于位置敏感探测器的激光位移传感器小波优化方法[J].中国激光, 2013(3):185-191. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20132013071700087197ZHU J G, CHEN H, XUE B. Wavelet optimization method of laser displacement sensor based on position sensitive detector[J]. Chinese Journal of Lasers, 2013(3):185-191.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20132013071700087197 [13] 袁江, 邱自学, 邵建新.集成激光位移传感器和编码器的曲面仿形测头研究[J].仪器仪表学报, 2010, 31(11):2488-2493. http://d.old.wanfangdata.com.cn/Periodical/yqyb201011014YUAN J, QIU Z X, SHAO J X. Research on free-form surface measurement system with integrated laser displacement sensor and linear encoder[J]. Chinese Journal of Scientific Instrument, 2010, 31(11):2488-2493.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yqyb201011014 [14] 马明建.数据采集与处理技术[M].第2版.西安:西安交通大学出版社, 2005.MA M J. Data Sampling and Processing Technology[M]. The Second Edition. Xi'an:Xi'an Jiaotong University press, 2005.(in Chinese) [15] 王庆有.图像传感器应用技术[M].第2版.电子工业出版社, 2013.WANG Q Y. Image Sensor Application Technology[J]. The Second Edition. Electronic Industry Press, 2013.(in Chinese) [16] 莫仁芸, 朱万彬, 钟俊, 等.激光位移传感器的光学系统设计[J].中国光学, 2010, 3(5):513-517. doi: 10.3969/j.issn.2095-1531.2010.05.015MO R Y, ZHU W B, ZHONG J, et al.. Optical design of laser displacement[J]. Chinese Optics, 2010, 3(5):513-517.(in Chinese) doi: 10.3969/j.issn.2095-1531.2010.05.015 [17] 孙浩, 薛丹丹, 韩焱.基于小孔光学系统与面阵CCD的激光位移传感器系统设计[J].应用光学, 2012, 33(6):1152-1155. http://d.old.wanfangdata.com.cn/Periodical/yygx201206030SUN H, XUE D D, HAN Y. Laser displacement sensor system based on pinhole optical system and array CCD[J]. Journal of Applied Optics, 2012, 33(6):1152-1155.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yygx201206030 [18] 许文海, 吴厚德.超高分辨率CCD成像系统的设计[J].光学精密工程, 2012, 20(7):1603-1610. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201207026XU W H, WU H D. Design of ultra-high resolution CCD imagine systems[J]. Opt. Precision Eng., 2012, 20(7):1603-1610.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201207026 [19] 王会峰.一种成像测量图像径向几何畸变的校正方法[J].应用光学, 2010, 31(1):55-59. doi: 10.3969/j.issn.1002-2082.2010.01.013WANG H F. Radial geometrical distortion correction in image measurement system[J]. Journal of Applied Optics, 2010, 31(1):55-59.(in Chinese) doi: 10.3969/j.issn.1002-2082.2010.01.013 [20] SUN H, HU M, RONG Q, et al. High sensitivity optical fiber temperature sensor based on the temperature cross-sensitivity feature of RI-sensitive device[J]. Optics Communications, 2014, 323(14):28-31. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=28ef7f2b7630f66ad3bfdb0b8373f3d4 [21] 孙彬, 李兵.一种量化的激光位移传感器倾角误差补偿模型[J].仪器仪表学报, 2015, 36(5):996-1004. doi: 10.3969/j.issn.0254-3087.2015.05.005SUN B, LI B. A quantitative error compensation model of the inclination angle of the laser displacement sensor[J]. Chinese Journal of Scientific Instrument, 2015, 36(5):996-1004.(in Chinese) doi: 10.3969/j.issn.0254-3087.2015.05.005 [22] LOMBARDO V, MARZULLI T, PAPPALETTERE C, et al.. A time-of-scan laser triangulation technique for distance measurements[J]. Optics & Lasers in Engineering, 2003, 39(2):247-254. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a3dfe6913607d4229dfc8ddb812d8bec [23] 李冬冬, 王永强, 许增朴, 等.激光三角法在物面倾斜时的测量误差研究[J].传感器与微系统, 2015(2):28-29. http://d.old.wanfangdata.com.cn/Periodical/cgqjs201502008LI D D, WANG Y Q, XU Z P, et al.. Research on measurement error while workpiece surface is inclining by laser triangulation[J]. Transducer and Microsystem Technologies, 2015(2):28-29.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/cgqjs201502008 [24] ALARURI S D. Excimer and Nd:YAG laser-based systems incorporating air-cooled fiber-optic probes for turbine engine high-temperature fluorescence intensity imaging and fluorescence decay lifetime thermometry measurements[J]. Optik-International Journal for Light and Electron Optics, 2016, 127(1):246-249. doi: 10.1016/j.ijleo.2015.09.254 [25] 郝明明, 刘云, 王彪, 等.半导体激光鼓膜造孔术的光学系统设计[J].光学精密工程, 2012, 20(2):247-255. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201202006HAO M M, LIU Y, WANG B, et al.. Design of optical system for diode laser myringotomy[J]. Opt. Precision Eng., 2012, 20(2):247-255.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201202006 [26] 陈国, 赵长明, 纪荣祎, 等.基于ZEMAX的半导体激光准直仿真设计[J].激光技术, 2012, 36(3):318-321. doi: 10.3969/j.issn.1001-3806.2012.03.008CHEN G, ZHAO CH M, JI R W, et al.. Simulation design of semiconductor laser collimation based on ZEMAX[J]. Laser Technology, 2012, 36(3):318-321.(in Chinese) doi: 10.3969/j.issn.1001-3806.2012.03.008 [27] 聂建华, 王峻宁.基于ZEMAX的半导体激光准直镜设计方法研究[J].红外, 2012, 33(3):22-26. doi: 10.3969/j.issn.1672-8785.2012.03.005NIE J H, WANG J N. Research on semiconductor collimator design based on ZEMAX[J]. Infrared, 2012, 33(3):22-26.(in Chinese) doi: 10.3969/j.issn.1672-8785.2012.03.005 [28] 宋延嵩, 安岩, 李欣航, 等.激光准直系统中的杂散光分析与抑制[J].中国光学, 2016, 9(6):663-670. http://www.chineseoptics.net.cn/CN/abstract/abstract9509.shtmlSONG Y S, AN Y, LI X H, et al.. Analyzing and suppressing of stray light in laser collimating system[J]. Chinese Optics, 2016, 9(6):663-670.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9509.shtml [29] HOEHLER M S, SMITH C M. Application of blue laser triangulation sensors for displacement measurement through fire[J]. Measurement Science & Technology, 2016, 27(11):115201. http://europepmc.org/abstract/MED/28066131 [30] 王少清, 庄葆华.基于朗伯定律重建光学三角法测位移原理公式[J].光学学报, 1996(12):1802-1808. doi: 10.3321/j.issn:0253-2239.1996.12.028WANG Z Q, ZHUANG B H. The principle formula of the optical triangulation method is reconstructed base on lambert's law[J]. Acta Optica Sinica, 1996(12):1802-1808.(in Chinese) doi: 10.3321/j.issn:0253-2239.1996.12.028 [31] 程强, 王志超, 黄志锋, 等.余弦粗糙面辐射特性数值模拟研究[J].工程热物理学报, 2011, 32(12):2096-2099. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201103956636CHENG Q, WANG ZH CH, HUANG ZH F, et al.. Numerical simulation of radiation property of cosine rough surface[J]. Journal of Engineering Thermophysics, 2011, 32(12):2096-2099.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201103956636 [32] 卢小丰, 原遵东.孔径光阑对辐射源尺寸效应(SSE)的影响研究[J].计量技术, 2010(7):3-5. doi: 10.3969/j.issn.1000-0771.2010.07.001LU X F, YUAN Z D. Study on the size-of-source effect due to the aperture of pyrometers[J]. Measurement Technique, 2010(7):3-5.(in Chinese) doi: 10.3969/j.issn.1000-0771.2010.07.001 [33] 欧忠敏, 郭海科, 金海鹰, 等.应用旋转Scheimpflug照相系统对角膜参数的研究[J].中华实验眼科杂志, 2010, 28(5):450-453. doi: 10.3969/j.issn.1003-0808.2010.05.020OU M ZH, GUO H K, JIN H Y, et al.. Investigation of corneal parameters using rotating Scheimpflug camera[J]. Chinese Journal of Experimental Ophthalmology, 2010, 28(5):450-453.(in Chinese) doi: 10.3969/j.issn.1003-0808.2010.05.020 [34] NADERAN M, SHOAR S, NADERAN M, et al.. Comparison of corneal measurements in keratoconic eyes using rotating Scheimpflug camera and scanning-slit topography[J]. International Journal of Ophthalmology, 2015, 8(2):275-280. http://old.med.wanfangdata.com.cn/viewHTMLEn/PeriodicalPaper_PM25938040.aspx [35] PENNA R R, DE S U, CATALANO M, et al. Placido disk-based topography versus high-resolution rotating Scheimpflug camera for corneal power measurements in keratoconic and post-LASIK eyes:reliability and agreement[J]. International Journal of Ophthalmology, 2017, 10(3):453-460. http://europepmc.org/abstract/MED/28393039 [36] 丁小昆, 刘铁根, 宋殿友.激光光斑质量对基于PSD的激光三角法长时间连续测量精度的影响[J].中国激光, 2012, 39(2):165-171. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200334823DING X K, LIU T G, SONG D Y, et al.. Impact of accuracy of laser spot quality in laser triangulation long-term continuous measuring based on PSD[J]. Chinese Journal of Lasers, 2012, 39(2):165-171.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200334823 [37] 张海庄, 姚梅, 雷萍, 等.远场激光光斑图像处理方法研究[J].激光技术, 2013, 37(4):460-463. http://d.old.wanfangdata.com.cn/Periodical/jgjs201304010ZHANG H ZH, YAO M, LEI P, et al.. Research of image processing method of far field laser spots[J]. Laser Technology, 2013, 37(4):460-463.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jgjs201304010 [38] 阎杰, 鲁拥华, 王沛, 等.径向偏振光聚焦光斑研究[J].光学学报, 2010, 30(12):3597-3603. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002865263YAN J, LU Y H, WANG P, et al.. Study of focal spot of radially polarized beam[J]. Acta Optica Sinic, 2010, 30(12):3597-3603.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201002865263 [39] MEI Q, GAO J, LIN H, et al.. Structure light telecentric stereoscopic vision 3D measurement system based on Scheimpflug condition[J]. Optics & Lasers in Engineering, 2016, 86:83-91. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6a2c4a3483b42ded8d3d265c95afe817 [40] ALARURI S D. f/1.6 diffraction-limited air-spaced Cooke triplet photographic lens designs for MWIR and LWIR imaging applications:geometrical optics performance comparison between Ge-ZnSe-Ge and Si-Ge-Si triplet designs using Zemax[J]. Optik-International Journal for Light and Electron Optics, 2016, 127(1):254-258. doi: 10.1016/j.ijleo.2015.10.085 -

 下载:
下载:

图(13) / 表(3)
计量
- 文章访问数: 2674
- HTML全文浏览量: 859
- PDF下载量: 257
- 被引次数: 0
