


Improved local convexity algorithm of segmentation for 3D point cloud
-
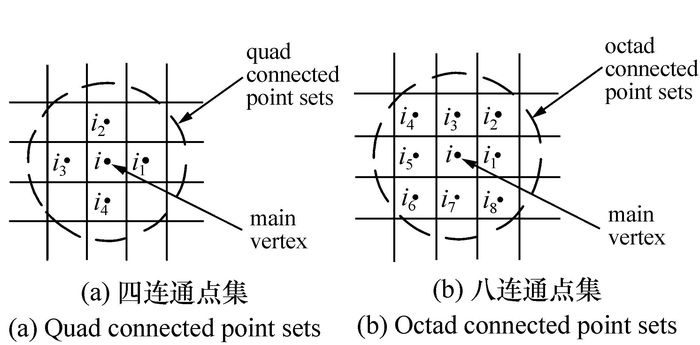
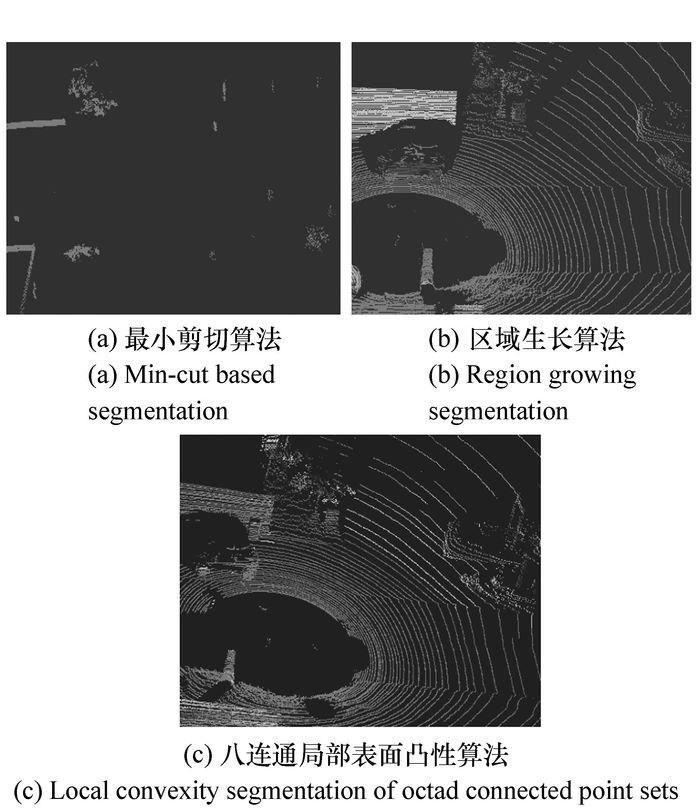
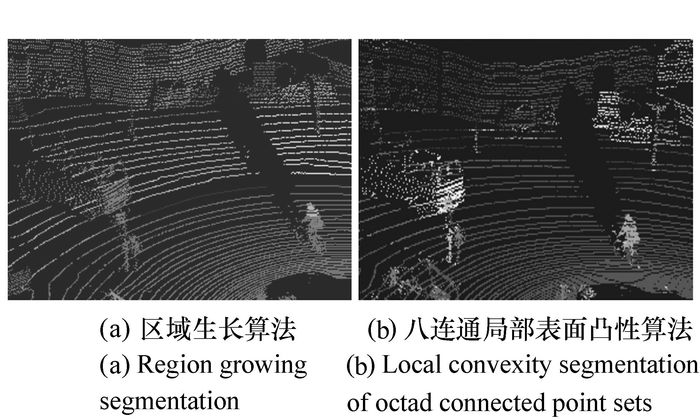
摘要: 点云分割是点云分类、识别以及三维重建等处理的基础,分割结果对后续应用影响巨大。本文提出利用连通点集改进局部表面凸性算法中邻近点关系的方法,解决目前激光三维成像系统点云分割算法在处理复杂环境散乱点云时存在分割过度及分割不充分的问题,通过主顶点与周围点构成连通集,作为分割判断局部子点集,形成有效分割区域。该方法解决了常用点云分割方法无法对形状不规则物体进行有效分割的问题,提高了分割精度。算法实验结果表明,相比于最小切割算法和区域生长算法,基于连通点集的改进局部表面凸性算法对实际路面环境信息的分割效果更好,并能在一定程度上避免分割过度和分割不充分的情况,证明该方法适用于复杂环境散乱点云数据分割。Abstract: Segmentation for point cloud is the basis of classification, recognition and reconstruction of point cloud datasets and the segmentation result plays an important role in following research. In this paper, we propose a method using connected point sets to analyze and improve the relationship between adjacent points in the local convexity segmentation, to solve problems of oversegmentation and undersegmentation when using the existing algorithms to segment scattered point cloud data in complex environment in 3D laser imaging system. By this method we use the main vertex and neighbors to constitute connected point sets which can be local point subsets of segmentation and form the effective segmented regions. The method solves the problem of the irregular object's segmentation, which can not be accomplished by common methods, and improves the accuracy of segmentation. Compared with the min-cut based segmentation and region growing segmentation, the improved local convexity segmentation of connected point sets is better for segmentation results of actual road information, and it can avoid oversegmentation and undersegmentation to some extent. It proved that this method is suitable for segmentation of scattered point cloud data in complex environment.
-
表 1 分割结果统计
Table 1. Statistics of segmentation result
原始数据 区域生长算法 八连通局部表面凸性算法 数据点 123 398 102 809 110 766 行人 ≥7 2 7 车辆 ≥4 4 4 路灯 ≥20 5 16  下载: 导出CSV
下载: 导出CSV
-
[1] 王飞, 汤伟, 王挺峰, 等.8×8APD阵列激光三维成像接收机研制[J].中国光学, 2015, 8(3):422-427. http://www.chineseoptics.net.cn/CN/abstract/abstract9304.shtmlWANG F, TANG W, WANG T F, et al.. Design of 3D laser imaging receiver based on 8×8 APD detector array[J]. Chinese Optics, 2015, 8(3):422-427.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9304.shtml [2] 孟庆季, 张续严, 周凌, 等.机载激光3D探测成像系统的关键技术[J].中国光学, 2011, 4(4):327-339. http://www.chineseoptics.net.cn/CN/abstract/abstract8681.shtmlMENG Q J, ZHANG X Y, ZHOU L, et al.. Key technologies of airborne laser 3D detection imaging system[J]. Chinese Optics, 2011, 4(4):327-339.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8681.shtml [3] 周森, 郭永彩, 高潮, 等.基于三维激光扫描的移动大尺寸圆柱体工件长度快速检测系统[J].光学精密工程, 2014, 22(6):1524-1530. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201406017.htmZHOU S, GUO Y C, GAO CH, et al.. Rapid length measuring system for mobile and large scale cylinder workpieces based on 3D laser scanning[J]. Opt. Precision Eng., 2014, 22(6):1524-1530.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201406017.htm [4] 吕恒毅, 李祥之, 韩诚山, 等.遥感相机静态调制传递函数的地面测试原理[J].液晶与显示, 2015, 30(5):851-856. http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201505018.htmLV H Y, LI X ZH, HAN CH SH, et al.. Principle of static modulation transfer function measurement for remote sensing cameras[J]. Chinese J. Liquid Crystals and Displays, 2015, 30(5):851-856.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201505018.htm [5] 张涛.红外系统小目标成像自动调光方法[J].液晶与显示, 2016, 31(4):399-403. http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201604011.htmZHANG T. Method of auto light control for small target in infrared system[J]. Chinese J. Liquid Crystals and Displays, 2016, 31(4):399-403.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201604011.htm [6] 石俊霞, 李佩玥, 李洪法, 等.遥感TDICCD相机侧摆成像及定位精度优化[J].液晶与显示, 2014, 29(5):777-784. http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201405024.htmSHI J X, LI P Y, LI H F, et al.. Scroll imaging of space TDI CCD remote sensing camera and optimazation of image location accuracy[J]. Chinese J. Liquid Crystals and Displays, 2014, 29(5):777-784.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201405024.htm [7] 靳永亮, 王延杰, 丁南南, 等.改进的红外弱小目标检测方法[J].液晶与显示, 2011, 26(4):555-560. http://cdmd.cnki.com.cn/Article/CDMD-10701-1016214210.htmJIN Y L, WANG Y J, DING N N, et al.. Improved method for small infrared target detection[J]. Chinese J. Liquid Crystals and Displays, 2014, 29(5):777-784.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10701-1016214210.htm [8] 王田, 刘伟宁, 孙海江, 等.基于复杂度和方向梯度的红外弱小目标检测方法[J].液晶与显示, 2012, (5):692-696. http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201205024.htmWANG T, LIU W N, SUN H J, et al.. Detecting algorithm of infrared small dim targets based on complexity and orientation gradient[J]. Chinese J. Liquid Crystals and Displays, 2012, (5):692-696.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201205024.htm [9] 郭萌, 赵岩, 王世刚, 等.基于区域选择的红外弱小目标超分辨率复原算法[J].液晶与显示, 2016, 31(4):415-420. http://cdmd.cnki.com.cn/Article/CDMD-80139-1014263816.htmGUO M, ZHAO Y, WANG SH G, et al.. Infrared dim-small target super-resolution restoration algorithm based on region selection[J]. Chinese J. Liquid Crystals and Displays, 2016, 31(4):415-420.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-80139-1014263816.htm [10] RABBANI T, VAN DEN HEUVEL F, VOSSELMANN G. Segmentation of point clouds using smoothness constraint[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2006, 36(5):248-253. [11] JAGANNATHAN A, MILLER E L. Three-dimensional surface mesh segmentation using curvedness-based region growing approach[J]. IEEE, 2007, 29(12):2195-2204. https://www.researchgate.net/profile/Eric_Miller8/publication/3194431_Three-Dimensional_Surface_Mesh_Segmentation_Using_Curvedness-Based_Region_Growing_Approach/links/00b4952caacaadedd5000000.pdf?disableCoverPage=true [12] ZAVODNY A, FLYNN P, CHEN X. Region extraction in large-scale urban lidar data[J]. IEEE, 2009:1801-1808. http://www3.nd.edu/~flynn/papers/ZavodnyFlynnChen_3DIM09.pdf [13] GUO C, SATO W, HAN L, et al.. Graph-based 2D road representation of 3D point clouds for intelligent vehicles[J]. IEEE, 2011, 30(1):715-721. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?reload=true&arnumber=5940502&sortType%3Dasc_p_Sequence%26filter%3DAND%28p_IS_Number%3A5940387%29%26pageNumber%3D5 [14] KLASING K, WOLLHERR D, BUSS M. A clustering method for efficient segmentation of 3D laser data[J]. IEEE, 2008:4043-4048. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.148.4379&rep=rep1&type=pdf [15] ZADEH L A. Fuzzy sets as a basis for a theory of possibility[J]. Fuzzy Sets & Systems, 1978, 1(1):3-28. [16] GOLOVINSKIY A, FUNKHOUSER T. Min-cut based segmentation of point clouds[J]. IEEE, 2009:39-46. http://www.cs.princeton.edu/~funk/s3dv09.pdf -

 下载:
下载:


图(5) / 表(1)
计量
- 文章访问数: 1662
- HTML全文浏览量: 445
- PDF下载量: 1004
- 被引次数: 0
