


-
摘要: 为了提高永磁同步电机驱动的大型望远镜转台的低速跟踪性能,设计了自适应滑模控制器以实时抑制系统的参数不确定性和外部扰动对系统的影响。为了优化控制器参数和缩短控制系统的调试周期,辨识出了转台控制系统的控制模型,同时建立了系统内部的非线性因素模型,综合上述模型对系统进行了集成仿真。仿真和实验结果证明了所设计的自适应滑模控制器对系统参数不确定性、外部扰动和噪声具有较好的鲁棒性,对望远镜转台的低速控制效果良好。Abstract: In order to improve the low speed performance of large telescope drived by permanent magnet synchronous motor(PMSM), an adaptive sliding mode controller(ASMC) is designed to suppress the uncertainty of system parameters and external disturbance. In order to optimize the parameters of the ASMC and shorten the system test period, an integrated model is built, which is based on the identified plant model and system inner nonlinear factor models. System simulation and experimental results show that the ASMC has the advantages of better robustness to the uncertainty of system parameters, external disturbance and noise, and has better performance for low speed control of large telescope.
-
Key words:
- large telescope /
- PMSM /
- ASMC /
- integrated modeling and simulation
-

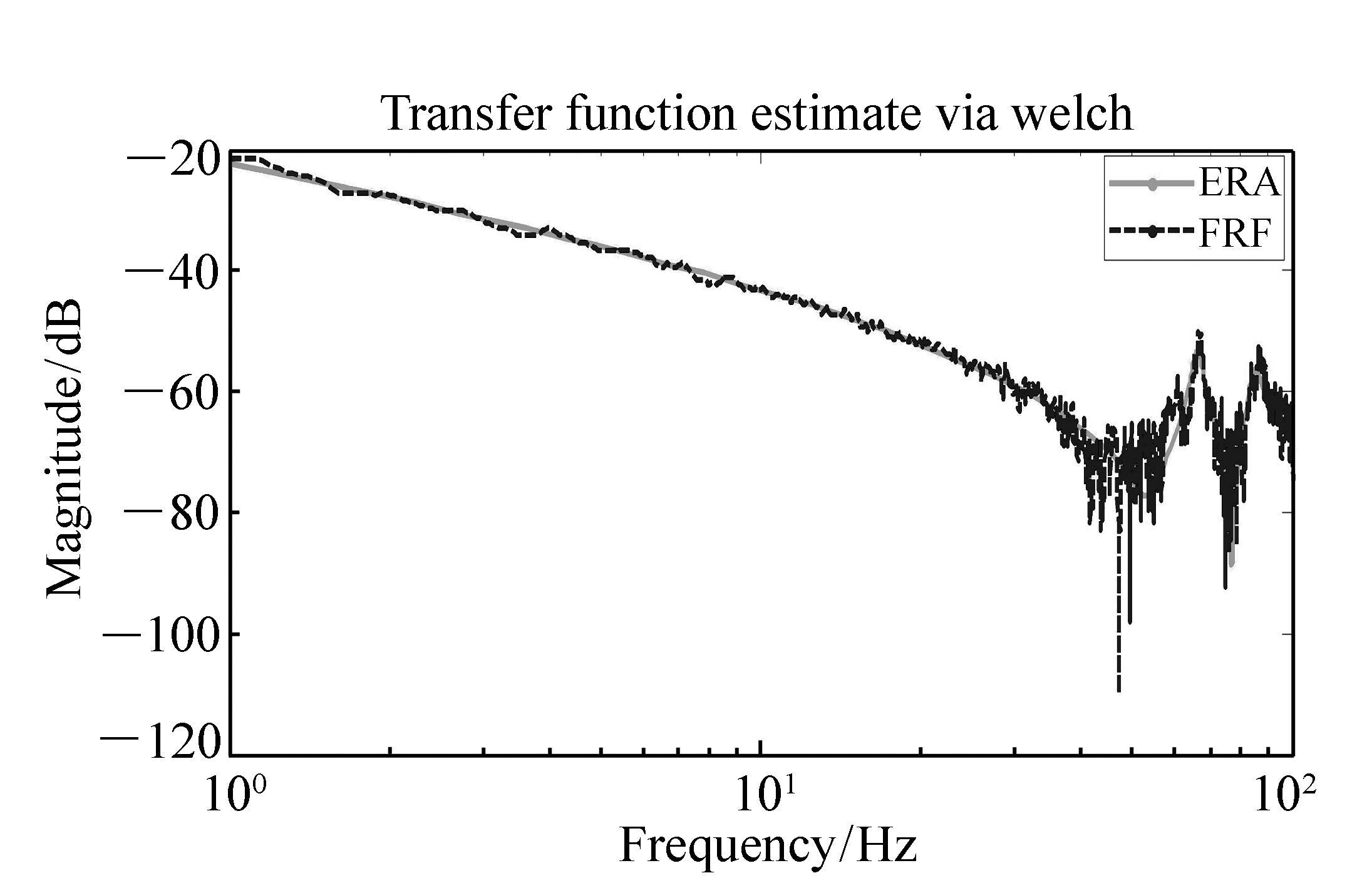
图 2 采用ERA辨识的望远镜转台传递函数幅值曲线
Figure 2. Magnitude curves of the telescope transfer function identified through ERA

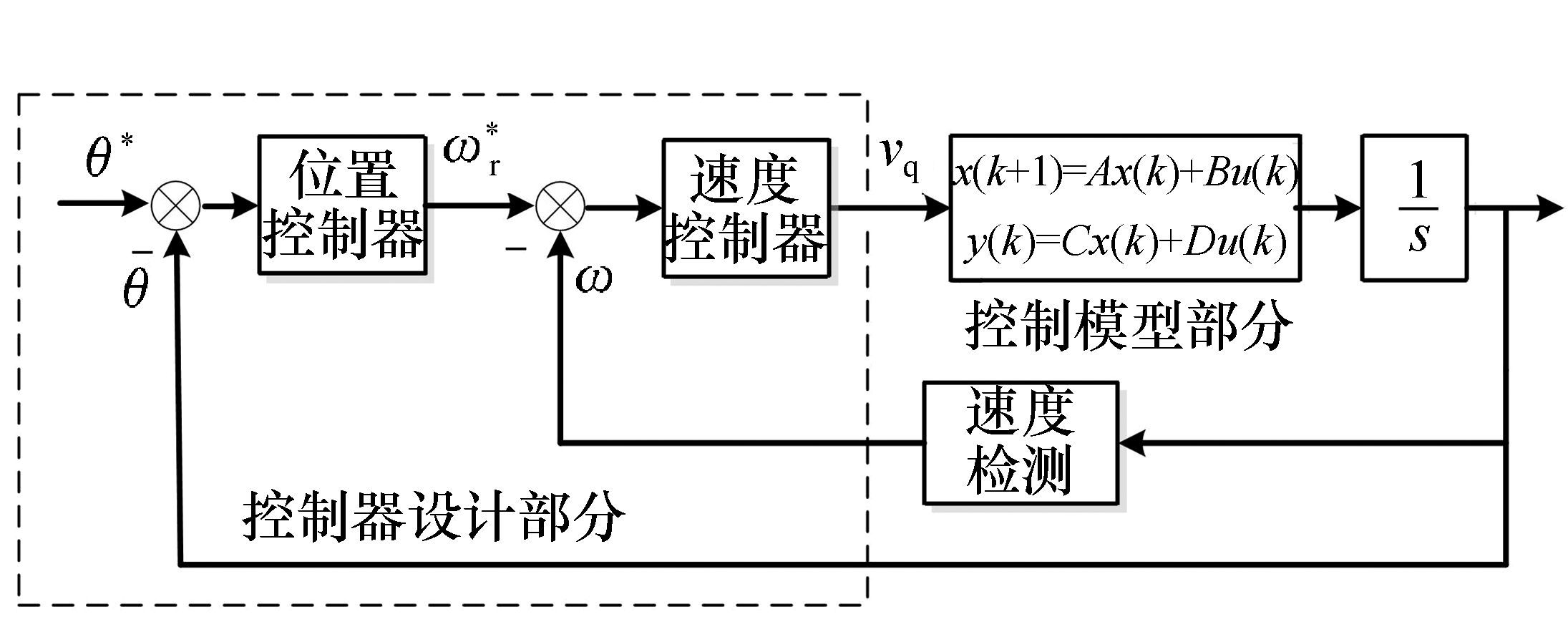
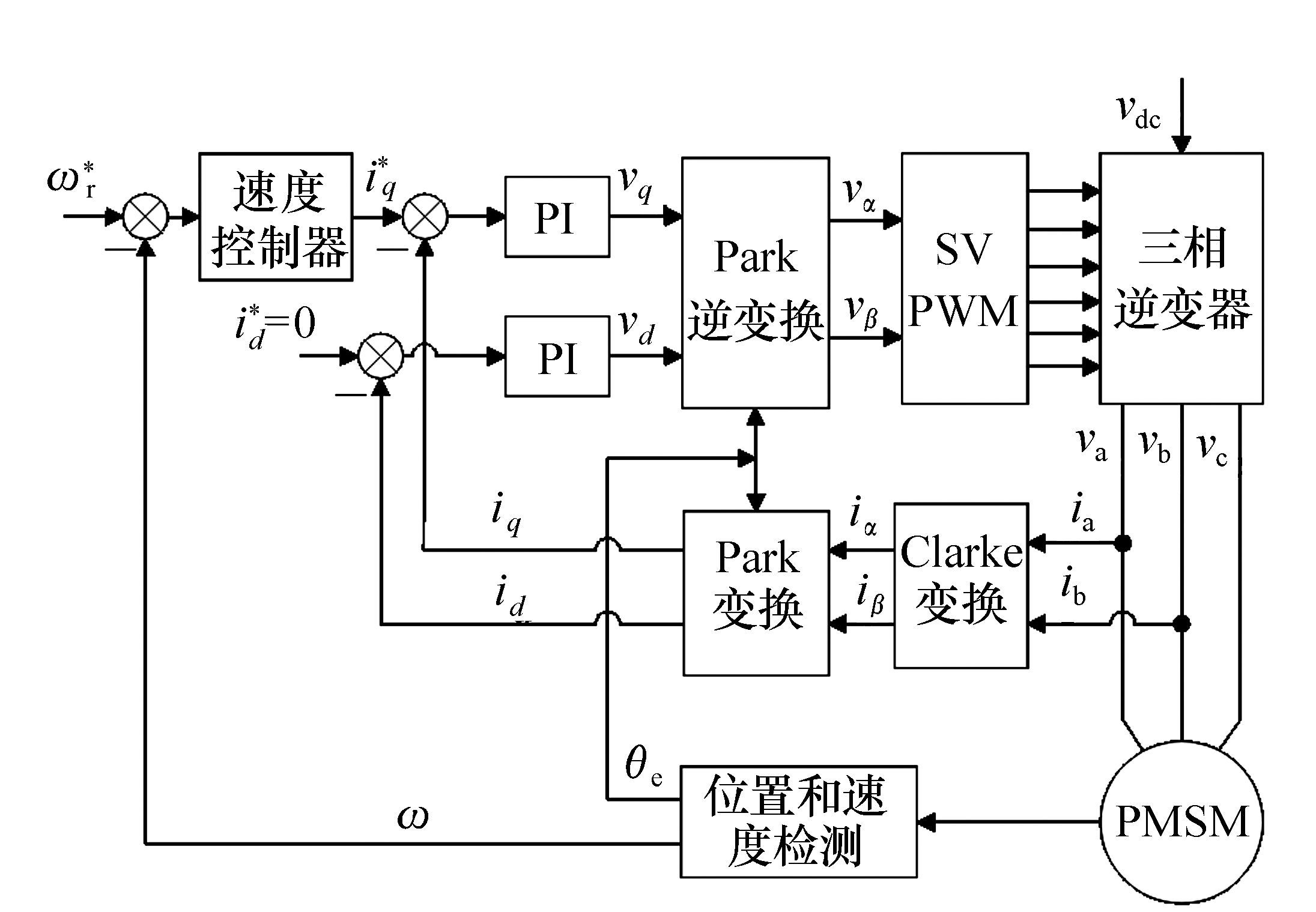
图 3 望远镜控制系统仿真模型框图
Figure 3. Simulation model block diagram of the control system of telescope
表 1 控制系统仿真参数
Table 1. Simulation parameters of control system
参数名称 参数值 库伦摩擦力矩 Fc/(N·m) 34 最大静摩擦力矩 Fs/(N·m) 40 速度阈值 vt/(arcsec·s-1) 5 力矩波动最大幅值/(N·m) 7.5 系数 k 65 编码器采样周期 tenc/Hz 1 000 编码器分辨率 qenc/marcsec 0.3  下载: 导出CSV
下载: 导出CSV
-
[1] 胡伟,王莉,张振超,等.基于DSP的大口径天文望远镜伺服控制的设计与实现[J].微电机,2010,43(8):38-40. http://www.cnki.com.cn/Article/CJFDTOTAL-WDJZ201008009.htmHU W,WANG L,ZHANG ZH CH. Design and implementation of servo control system of the large aperture telescope based on DSP[J]. Micro-Motor,2010,43(8):38-40.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-WDJZ201008009.htm [2] 常九健.基于弧形电机拼接的大型望远镜驱动技术研究[D].成都:中国科学院光电技术研究所,2013.CHANG J J. New direct drive method for large telescope base on Arc PMLSM[D]. Chengdu:The Institute of Optics and Electronics, Chinese Academy of Sciences, 2013.(in Chinese) [3] 王国民.天文光学望远镜轴系驱动方式发展概述[J].天文学进展, 2007,25(4):364-374. http://www.cnki.com.cn/Article/CJFDTOTAL-TWJZ200704008.htmWANG G M. Review of drive style for astronomical optical telescope[J]. Progress Astronomy,2007,25(4):364-374.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-TWJZ200704008.htm [4] SVAREZ M. The GTC main axes servos and control system[C]. New York:Springer,2008:1-12. [5] ERM T,GVTIERREZ P. Integration and tuning of the VLT drive systems[C]. New York:Springer,2003:490-499. [6] TAKESHI N,WATARA T,TOSHIYUKI S,et al.. Telescope Control Systems Ⅲ. Hilton L,ed. Bellingham[J]. SPIE,1998:361-366. [7] GILARDI G,SZETO K,HUARD S,et al.. Finite element analysis of the cogging force in the linear synchronous motorarray for the Thirty Meter Telescope[J]. Mechatronics,2011,21(3):116-124. http://cn.bing.com/academic/profile?id=2067735466&encoded=0&v=paper_preview&mkt=zh-cn [8] MASANOR I,JELT W. Ground-based Telescopes, Oschmamn J M Jr, ed. Bellingham[J]. SPIE,2004:417-428. http://cn.bing.com/academic/profile?id=1992946145&encoded=0&v=paper_preview&mkt=zh-cn [9] REN CH ZH,CHAO ZH ZH. One arc PMSM for telescope tracking system[J]. SPIE,2008,7012:70123O-8. http://cn.bing.com/academic/profile?id=2062917803&encoded=0&v=paper_preview&mkt=zh-cn [10] CHANG J J,MA W L,HUANG J L. Design and optimization of arc permanent magnet synchronous motor used on large telescope[J]. IEEE Transactions on Magnetics,2012,48(5):1943-1947. doi: 10.1109/TMAG.2011.2173947 [11] 邓永停,李洪文,王建立,等.基于DSP和FPGA的望远镜伺服控制系统设计[J].红外与激光工程,2014,43(3):908-914. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201403043.htmDENG Y T,LI H W,WANG J L,et al.. Design of telescope servo system based on DSP and FPGA[J]. Infrared and Laser Engineering,2014,43(3):908-914.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201403043.htm [12] THOMPSON P M,MACMYNOWSKI D G,SIROTA M J. Analysis of the TMT mount control system[J]. SPIE,2008,7012:701260-7. http://cn.bing.com/academic/profile?id=1995435880&encoded=0&v=paper_preview&mkt=zh-cn [13] 胡强晖,胡勤丰.全局滑模控制在永磁同步电机位置伺服中的应用[J].中国电机工程学报,2011,31(18):61-66. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201118011.htmHU Q H,HU Q F. Global sliding mode control for permanent magnet synchronous motor servo system[J]. Proceedings of the CSEE,2011,31(18):61-66.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201118011.htm [14] 方斯琛,周波.滑模控制的永磁同步电机伺服系统一体化设计[J].中国电机工程学报,2009,29(3):96-101. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC200903016.htmFANG S CH,ZHOU B. Integrated design for permanent magnet synchronous motor servo systems based on sliding mode control[J]. Proceedings of the CSEE,2009,29(3):96-101.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC200903016.htm [15] 张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3):111-116. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201203018.htmZHANG X G,SUN L,ZHAO K. Sliding mode control of PMSM based on a novel load torque sliding mode observer[J]. Proceedings of the CSEE,2012,32(3):111-116.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201203018.htm [16] 侯立民,张化光,刘秀翀.带ESO的自适应滑模调节的SPMSM自抗扰-无源控制[J].控制与决策,2010,25(11):1652-1656. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201011012.htmHOU L M,ZHANG H G,LIU Z CH. Adaptive sliding mode controller based on extended state observer of SPMSM with active disturbance rejection-passivity-based controller[J]. Control and Decision,2010,25(11):1652-1656.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201011012.htm [17] 王帅,陈涛,李洪文,等.光电伺服系统的频率特性测试与模型辨识[J].光学精密工程,2009,17(1):79-83. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM200901014.htmWANG SH,CHEN T,LI H W,et al.. Frequency characteristic test and model identification for O-E tracking servo system[J]. Opt. Precision Eng.,2009,17(1):79-83.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM200901014.htm [18] JUANG J N,PHAN M,HORTA L G,et al.. Identification of observer/kalman filter markov parameters:theory and experiments[J]. J. Guidance,Control and Dynamics,1993,16(2):320-329. doi: 10.2514/3.21006 [19] 刘丽兰,刘宏昭,吴子英,等.机械系统中摩擦模型的研究进展[J].力学进展,2008,38(2):201-212. http://www.cnki.com.cn/Article/CJFDTOTAL-LXJZ200802008.htmLIU L L,LIU H ZH,WU Z Y,et al.. An overview of friction models in mechanical systems[J]. Advances in Mechanics,2008,38(2):201-212.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-LXJZ200802008.htm [20] 刘承军,张辉,邹继斌.永磁同步电机齿槽定位力矩补偿[J].电工技术学报,2007,22(7):131-135. http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS200707024.htmLIU CH J,ZHANG H,ZOU J B. Compensation for the cogging torque of permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society,2007,22(7):131-135.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS200707024.htm -

 下载:
下载:

图(9) / 表(1)
计量
- 文章访问数: 1815
- HTML全文浏览量: 547
- PDF下载量: 822
- 被引次数: 0
