


Moving object tracking based on multi-feature fusion in the complex background gray image
-
摘要: 为解决低对比度、低信噪比、目标旋转、缩放等非理想状态给跟踪算法的研究带来的诸多困难,本文提出灰度图像多特征融合目标跟踪算法,保证在满足工程实践需要的条件下,能够对目标进行稳定的跟踪。算法首先对灰度图像利用Sobel算子求出梯度特征,将X、Y双方向的梯度特征与灰度特征相融合得到新特征,新特征在核密度函数下对低对比度,目标轮廓形状变化较大的情况有较高的适应性和稳定性,再利用背景建模的方法对提取的运动目标区域进行加权,降低非跟踪目标的权值,最后对融合后的加权特征目标利用改进MeanShift算法进行跟踪。通过大量的实验表明,该算法适应目标和背景的复杂变化,并且具有较强的鲁棒性,基本满足在复杂背景灰度图像下目标跟踪的工程实际需求。
-
关键词:
- 目标跟踪 /
- 边缘检测 /
- Sobel算子 /
- MeanShift跟踪
Abstract: In order to solve the problem of current moving object tracking algorithm which can not apply in some non-ideal conditions such as low contrast, low signal to noise ratio, target rotation and scaling, this paper presents a method based on multi-feature fusion in the complex background by improving the meanshift algorithm to realize the complex gray image tracking. The algorithm needs to not only meet the conditions required for engineering practice but also satisfy precise in object tracking stabilization. Firstly, using the algorithm we calculate gradient characteristics in gray image, the gradient characteristics including gradient features in X, Y two directions. Secondly, the algorithm integrates the two directions gradient and gray features to get new fusion features. The new fusion features provide more distinguishable measurements than the traditional ones, and they have high adaptability and stability in some conditions such as low contrast, large flexible changes of targets by using the kernel density function. Thirdly, the foreground objects results can be extracted by background modeling object detection algorithm, which takes moving target feature information as a weight value. Finally, the fusion features object is tracked by improved meanshift algorithm in this paper. A series of experiments results show that the multi-feature fusion moving object tracking method can stably track low contrast target in complex gray image. The algorithm can adapt to the complex changes of object and background. And it also has strong robustness to meet the actual needs of the engineering practice.-
Key words:
- target tracking /
- edge detection /
- sobel operator /
- MeanShift
-

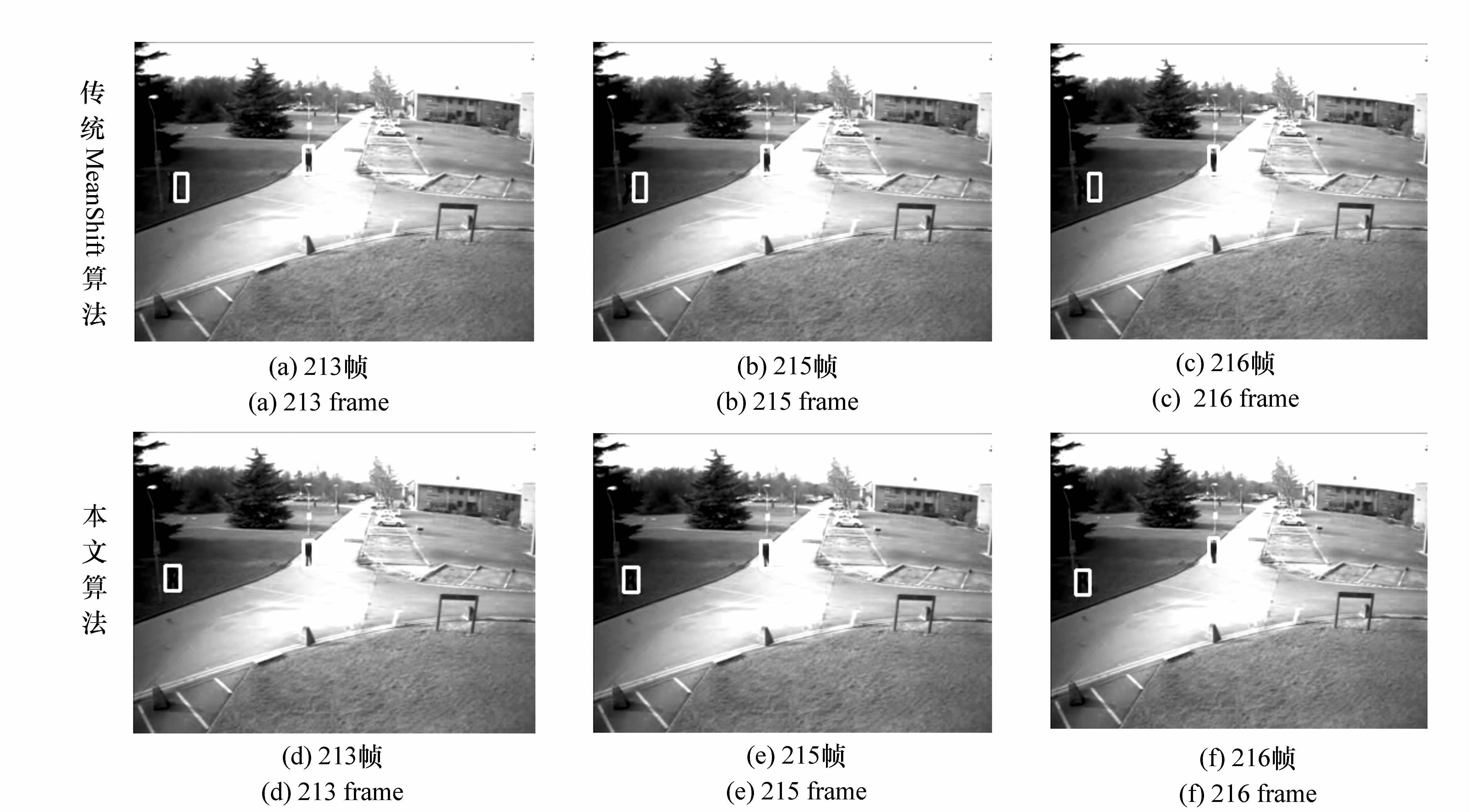
图 6 微软通用视频集本文跟踪算法和传统算法对比分析
Figure 6. Comparison analysis between our algorithms and traditional one in Microsoft video set

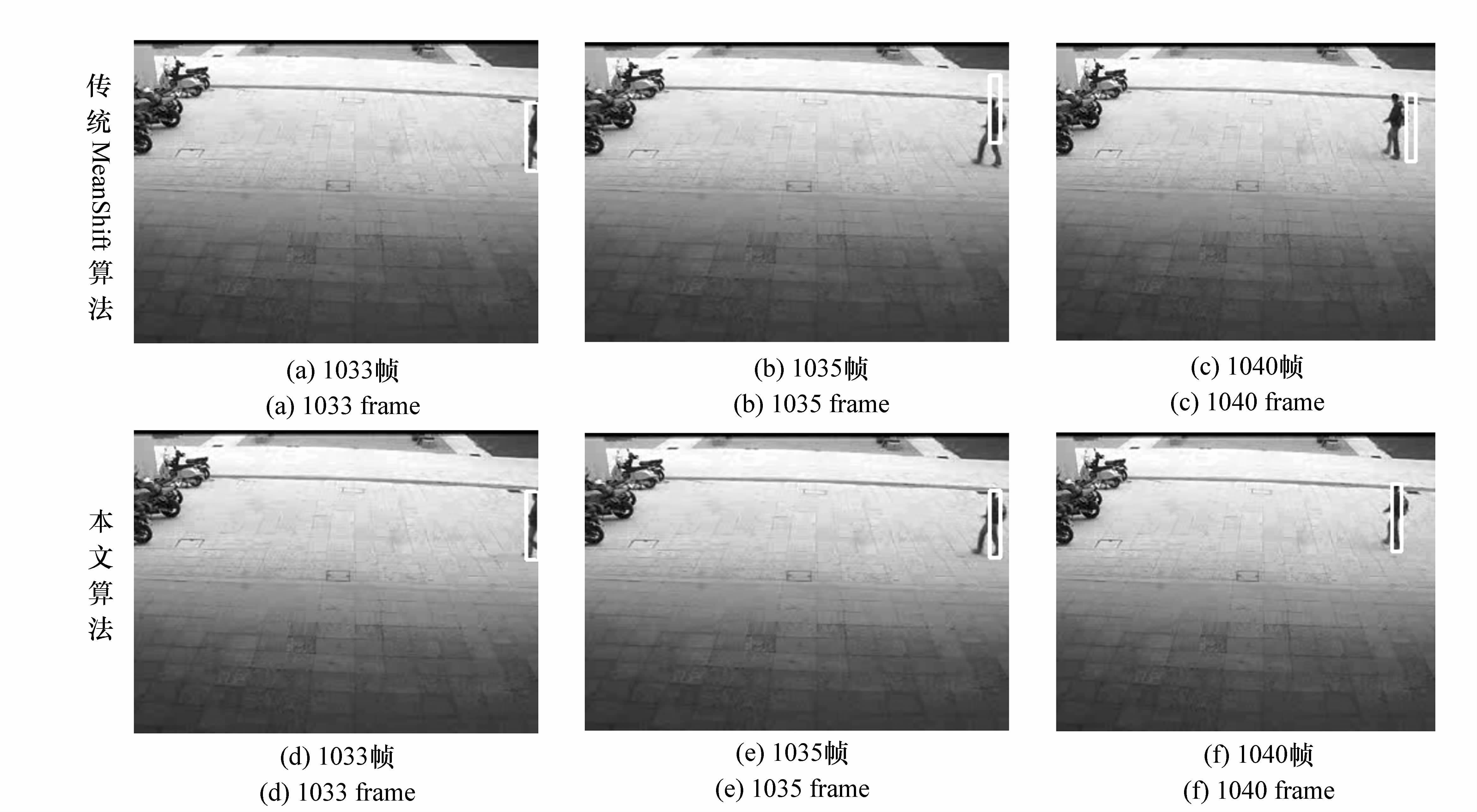
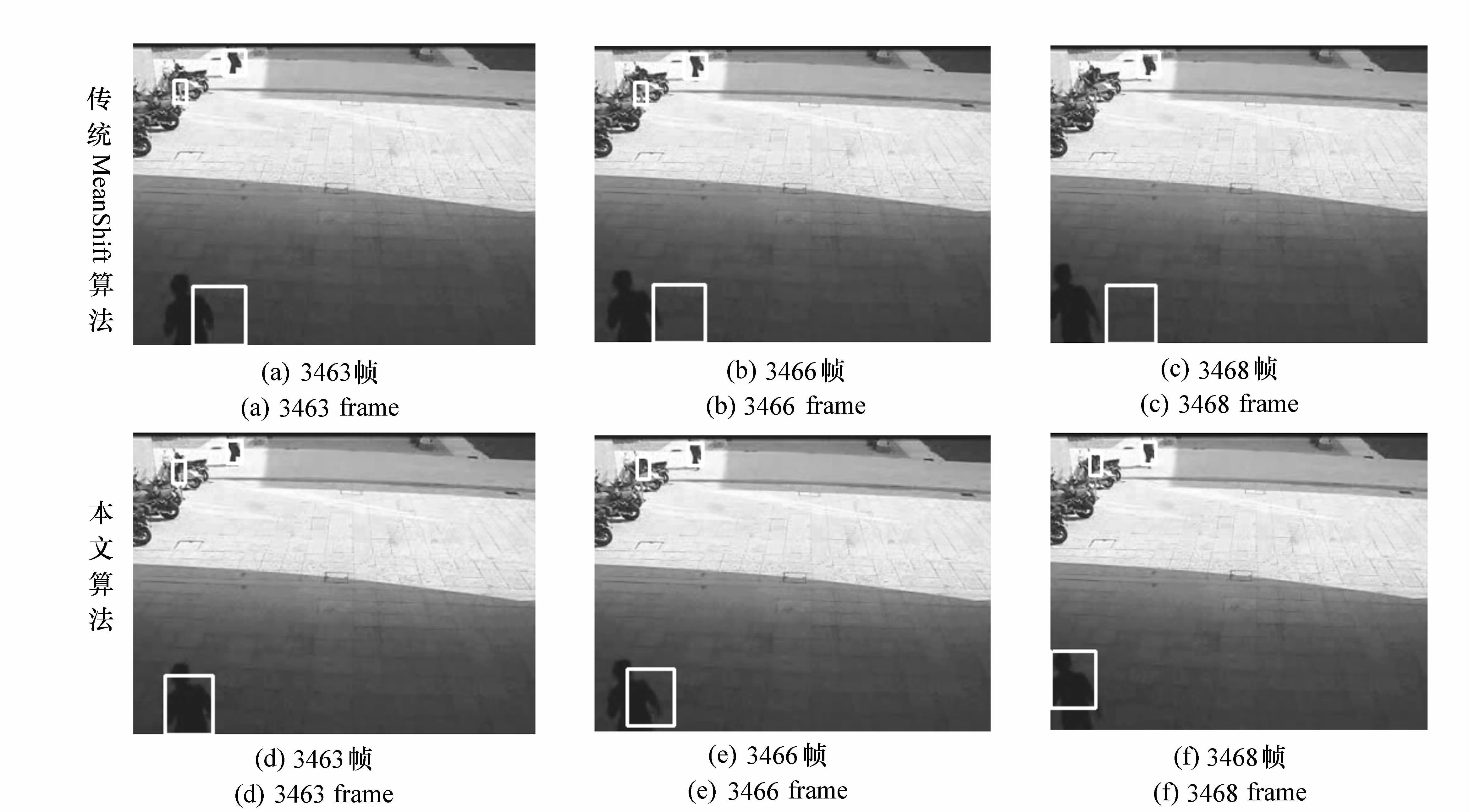
图 7 自制视频集本文跟踪算法和传统算法对比分析
Figure 7. Comparison analysis between our algorithms and traditional one in self-made video set
-
[1] 高文,朱明,贺柏根,等.目标跟踪技术综述[J].中国光学,2014,7(3):365-375.GAO W,ZHU M,HE B G,et al. Overview of target tracking technology[J]. Chinese Optics,2014,7(3):365-375.(in Chinese) [2] 刘扬,张云峰,董月芳.复杂背景下抗遮挡的运动目标跟踪算法[J].液晶与显示,2010,25(6):890-895.LIU Y,ZHANG Y F,DONG Y F. Anti-occlusion algorithm of tracking moving object in clutter background[J]. Chinese J. Liquid Crystals and Displays,2010,25(6):890-895.(in Chinese) [3] 宋策,张葆,尹传历.适于机载环境对地目标跟踪的粒子滤波设计[J].光学 精密工程,2014,4(22):1037-1047.SONG C,ZHANG B,YIN CH L. Particle filter design for tracking ground targets in airborne environment[J]. Opt. Precision Eng.,2014,4(22):1037-1047.(in Chinese) [4] 李静宇,王延杰.基于子空间的目标跟踪算法研究[J].液晶与显示,2014,4(29):617-622.LI J Y,WANG Y J. Subspace based target tracking algorithm[J]. Chinese J. Liquid Crystals and Displays,2014,4(29):617-622.(in Chinese) [5] NING J F,ZHANG L,ZHANG D,et al. Scale and orientation adaptive meanshift tracking[J]. IET Computer Vision,2012,6(1):52-61. [6] 王铭明,陈涛,王建立,等.Mean-shift跟踪算法及其在光电跟踪系统中的应用[J].中国光学,2014,7(2):332-338.WANG M M,CHEN T,WANG J L,et al. Mean-shift tracking algorithm and its application in optoelectronic tracking system[J]. Chinese Optics,2014,7(2): 332-338.(in Chinese) [7] 王田,刘伟宁,韩广良,等.基于改进MeanShift的目标跟踪算法[J].液晶与显示,2012(3):396-400.WANG T,LIU W N,HAN G L,et al. Target tracking algorithm based on improved meanshift[J]. Chinese J. Liquid Crystals and Displays,2012(3):396-400.(in Chinese) [8] 闫辉,许廷发,吴青青,等.多特征融合匹配的多目标跟踪[J].中国光学,2013,6(2):163-170.YAN H,XU T F,WU Q Q,et al. Multi-object tracking based on multi-feature joint matching[J]. Chinese Optics,2013,6(2):163-170.(in Chinese) [9] 郭敬明,何昕,魏仲慧.基于在线支持向量机的Meanshift彩色图像跟踪[J].液晶与显示,2014,1(29):120-128.GUO J M,HE X,WEI ZH H. New mean shift tracking for color image based on online support vector machine[J]. Chinese J. Liquid Crystals and Displays,2014,1(29):120-128.(in Chinese) [10] COMANICIU D,RAMESH V,MEER P. Kernel-Based object tracking[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence,2003,25(2):564-577. [11] DECARLO D,METAXAS D. Optical flow constraints on deformable models with applications to face tracking[J]. In ternational J. Computer Vision,2000,38(2):99-127 [12] LI X H,ZHANG T Y,SHEN X D,et al. Object tracking using an adaptive Kalman filter combined with mean shift[J]. SPIE J. Optical Engineering,2010,49(2):020503-3. [13] 文志强,蔡自兴.目标跟踪中巴氏系数误差的分析及其消除方法[J].计算机学报,2008,31(7):1165-1173.WEN ZH Q,CAI Z X. Errors of bhattacharyya coefficient and its reduction in object tracking[J]. Chinese J. Computers,2008,31(7):1165-1173.(in Chinese) [14] AHMAD S,KHATTAK,GULLISTAN T,et al. Integration of mean-shift and particle filter:a survey[C]. 12th International Conference on Frontiers of Information Technology. Islamic:FIT,2014:286-291. [15] 郭巳秋,许廷发,王洪庆,等.改进的粒子群优化目标跟踪方法[J].中国光学,2014,7(5):759-767.GUO S Q,XU T F,WANG H Q,et al. Object tracking method based on improved particle swarm optimization[J]. Chinese Optics,2014,7(5):759-767.(in Chinese) [16] JIA W H,YING Y Y. Multi-iterative tracking method using meanshift based on kalman filter[C]. International Conference on Signal Processing,Communications and Computing. China:ICSPCC,2014:22-27. [17] RASHID M,RAB N,NAVEED I R. Occlusion handling in meanshift tracking using adaptive window normalized cross correlation[C]. International Bhurban Conference on Applied Sciences and Technology. Islamic:IBCAST,2014:126-129. [18] VEZZANI R,GRANA C,CUCCHIARA R. Probabilistic people tracking with appearance models and occlusion[J]. Pattern Recognition Letters,2011,32(6):867-877. [19] 袁春兰,熊宗龙,周雪花,等.基于Sobel算子的图像边缘检测研究[J].激光与红外,2009,39(1):85-87.YUAN CH L,XIONG Z L,ZHOU X H,et al. Study of infrared image edge detection based on sobel operator[J]. Laser and Infrared,2009,39(1):85-87.(in Chinese) -

 下载:
下载:

图(8)
计量
- 文章访问数: 2044
- HTML全文浏览量: 632
- PDF下载量: 1064
- 被引次数: 0
