


Research status and development tendency of star tracker technique
-
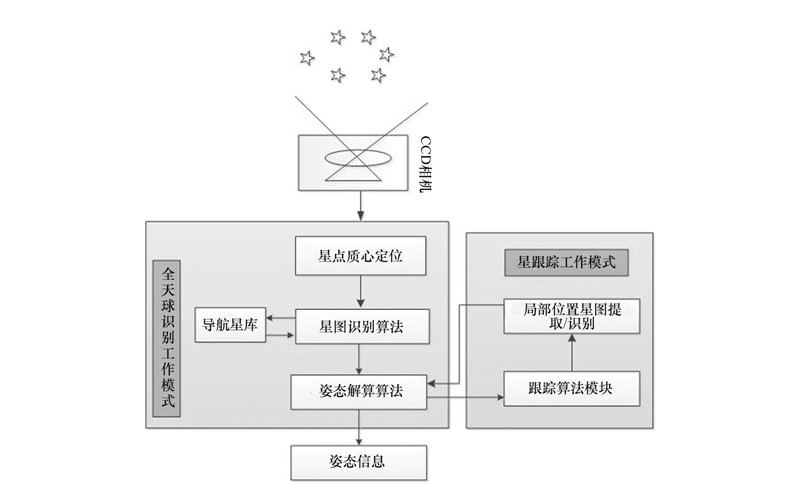
摘要: 本文综述了星敏感器技术的研究现状和未来发展趋势。首先,总结了国内外星载星敏感器的发展历程。接着,根据星敏感器工作原理,分析讨论了星点质心定位算法、星图识别算法和姿态解算算法等星敏感器关键技术的发展现状。通过讨论星点质心定位精度对星敏感器测量精度影响,分析了星点质心定位算法以及对应误差补偿的研究现状;基于星座特征、字符模式和智能行为,介绍了星图识别算法并进行了对比分析;根据确定姿态解算算法和动态姿态解算算法分析了姿态解算算法的研究现状。最后,对星敏感器的未来发展进行了展望,讨论了航空机载星敏感器、微小型星敏感器和甚高精度星敏感器的发展趋势以及未来重点研究内容。Abstract: In this paper, the research status and development tendency of star tracker technique are reviewed.Firstly, the development process of star tracker at home and abroad is summarized.Then, key techniques such as star centroid algorithm, star recognition algorithm and attitude determination algorithm are summarized respectively based on the working principle of star tracker.Based on the influence of star centroid localization precision on measurement precision of star tracker, the research status of star centroid localization algorithm and the corresponding error compensation are discussed.According to the constellation characteristics, character models and intelligent behavior, the star map recognition algorithm is introduced and the comparative analysis is developed.According to the determined attitude determination algorithm and dynamic attitude determination algorithm, the research status of attitude determination algorithm is discussed.Finally, the future development of star tracker is prospected, and the development trend and key research contents in the future of airborne star tracker, micro star tracker and super high precision star tracker are discussed.
-
Key words:
- star tracker /
- star centroid /
- star recognition /
- attitude determination
-
表 1 ASTRO星敏感器性能参数
Table 1. Performance parameters of ASTROS star tracker
参数 ASTROS 视场(°×°) 2.2×3.3 敏感星等(Mv) 8.2 精度(arcsec) P/Y,R 4,50(3σ) 姿态更新频率/Hz 6 质量/kg 41 功耗/W 43  下载: 导出CSV
下载: 导出CSV
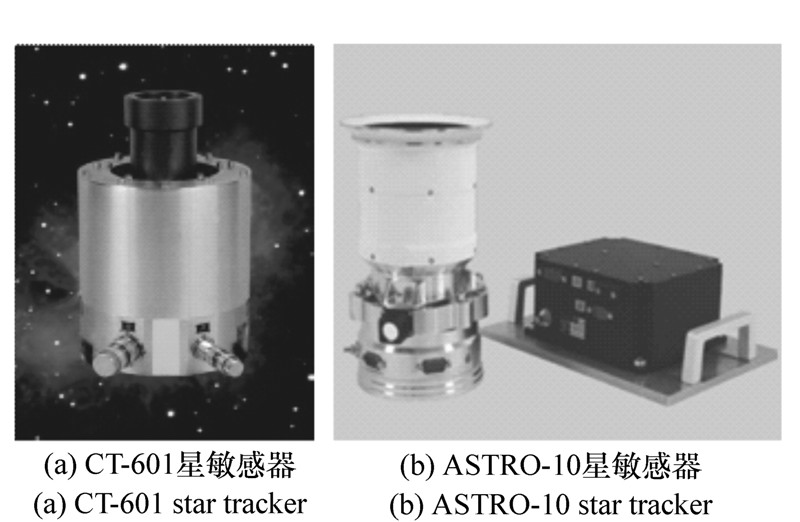
表 2 CT-601和ASTROA-10星敏感器性能参数
Table 2. Performance parameters of CT-601 and ASTROA-10 star tracker
参数 CT-601 ASTROA-10 初始姿态时间/s 5 8 视场(°×°) 8×8 17.6×17.6 敏感星等(Mv) 1.0~6.0 6.0 精度(arcsec) P/Y,R 3,5(1σ) 2,15(3σ) 姿态更新频率/Hz 10 4 质量/kg 7.8 3.1 功耗/W 8~12 14
下载: 导出CSV
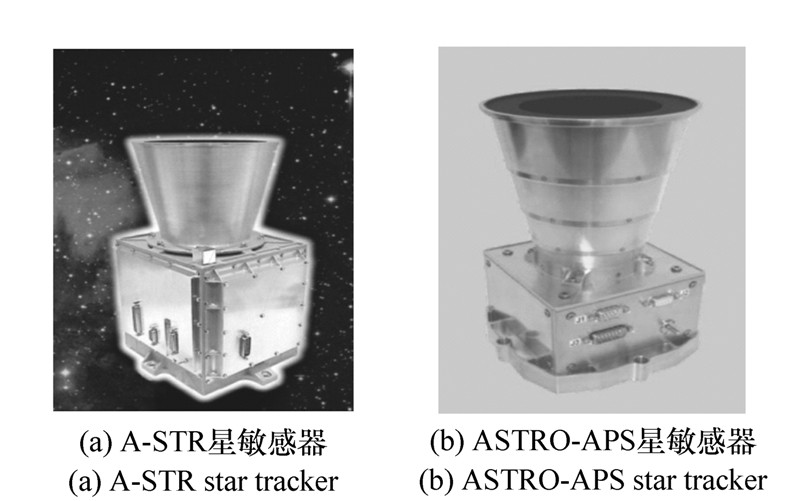
表 3 A-STR和ASTRO APS星敏感器性能参数
Table 3. Performance parameters of A-STR and ASTRO-APS star tracker
参数 A-STR ASTRO-APS 初始姿态时间/s <6 2 视场(°×°) 16.4×16.4 20×20 敏感星等(Mv) 6.3 5.8 精度(arcsec) P/Y,R 9,25(3σ) 1,8(3σ) 姿态更新频率/Hz 10 104 质量/kg 3 2.2 功耗/W 8.9 4
下载: 导出CSV
表 4 星图识别算法性能对比分析
Table 4. Performance contrast analysis of star identification algorithms
类型 优点 缺点 类型1 直观易懂,容易实现,误匹配概率低 星图识别的速率和成功率对星敏感器测量误差很敏感, 与导航星库存储量和搜索算法性能相关 类型2 存储量很小、识别速度快、算法对星 敏感器的测量误差不敏感 识别成功率受到星点质心位置精度和星等 精度影响比较大 类型3 识别率高、识别速度快,数据存储 量低、实时性和鲁棒性好 需要大量的样本集进行训练,识别的精度受到训练集 大小和训练时间的影响,而且对硬件的要求也比较高
下载: 导出CSV
表 5 星敏感器姿态解算算法对比分析
Table 5. Performance contrast analysis of attitude determine algorithms
类型 具体方法 特点 静态确定性算法 QUEST 单点批处理算法,通过求解特征向量得到最 优四元数解,运算效率高,应用最广泛。 TRIAD 利用两个互不平行矢量计算姿态矩阵,得到解是非最优的 动态滤波算法 EKF 发展成熟,应用广泛,鲁棒性不强,易于发散, 对强非线性估计问题不能得到最优解,服从高斯分布假设条件 UKF 算法收敛性好,能够在大误差的初始条件下 得到比较优化的结果,服从高斯分布假设条件 滤波QUEST QUEST算法的扩展,算法容易实现,但是精度较差 RE-QUEST QUEST算法的推广,在数学原理上与滤波QUEST算法等同 粒子滤波 基于序列蒙特卡洛的方法,可以解决非线性、非高斯分布和非 平稳状态的滤波估计问题,计算量大,实现比较困难
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] -

 下载:
下载:


计量
- 文章访问数: 5924
- HTML全文浏览量: 1525
- PDF下载量: 2446
- 被引次数: 0
