


Overview of AC servo control system for the large telescope
-
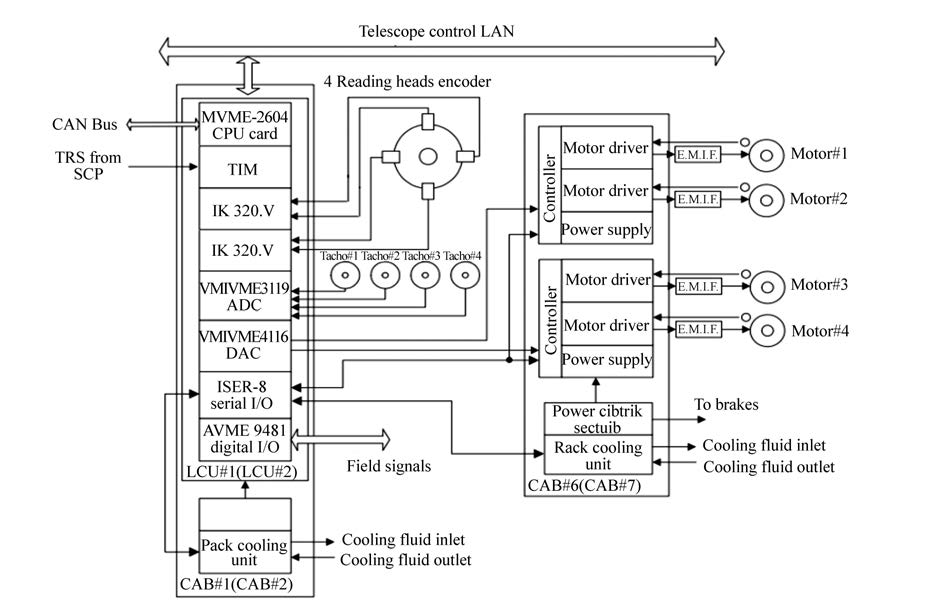
摘要: 本文主要介绍了当前国际上地基大口径望远镜交流伺服控制系统的发展现状,详细论述了望远镜驱动方式的选择、交流永磁同步力矩电机的应用情况、控制系统的硬件组成以及伺服系统的控制策略。讨论了大型望远镜交流伺服控制系统设计的难点及未来发展趋势,为大型望远镜交流伺服控制系统的设计提供一定的参考。Abstract: In this paper, the AC servo control system for the large ground based telescopes is introduced. The choice of telescope drive modes, the application of permanent magnet synchronous motor(PMSM), the hardware structure of control system and the control strategies of servo system are discussed in detail. And the difficulties and future trend of large telescope AC servo control system are also discussed. These discussions provide some reference for the design of large telescope control system.
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] -

 下载:
下载:








图(21) / 表(4)
计量
- 文章访问数: 2535
- HTML全文浏览量: 1082
- PDF下载量: 891
- 被引次数: 0
