


Error analysis and experimentation of scale tape encoder
-
摘要: 根据望远镜测角系统的精度需求,分析了影响拼接式编码器测角精度的误差源,以及多读数头测角消差原理,确定了采用相位相差90°的4读数头的测角方式。在某望远镜方位轴系转台进行了逆时针和顺时针方向的测角试验,通过对测角数据进行谐波分析并补偿后,得到两组实验测角误差RMS分别为0.34"、0.38"。实验表明,相位相差90°的均布4读数头的测角方式消除了由轴系误差、编码器安装位置误差和钢带安装盘部分圆度误差对测角精度的影响,实现了亚角秒级测角的目的。研究结果可用于大口径望远镜设计阶段的误差分析与分配、预估测角精度,为降低设计和加工误差提供参考。Abstract: According to the accuracy specifications of telescope goniometry, error sources of sacle tape grating encoder and the angle measuring principle of multi reading head are analyzed. A 4-reading heads angle measurement program which have 90° phase difference, have been developed. And we make counterclockwise and clockwise angle measuring experiments on an azimuth turntable of telescope through harmonic processing and error compensation, and two sets of experiments measuring angle error RMS values of 0.42" and 0.41" are obtained. Experiment results show that the effect of shafting errors, processing error of installation position and partly roundness error for installation torus on the angular measurement accuracy is eliminated by harmonic processing and phase difference method, and high precision angle measurement with sub-arc-second-accuary is achieved. The research results are useful for analyzing and distributing errors, forecasting angle measuring accuracy and reducing design and machining errors in the design of large aperture telescopes.
-
Key words:
- scale tape grating encoder /
- angular measurement accuracy /
- harmonic analysis /
- telescope
-

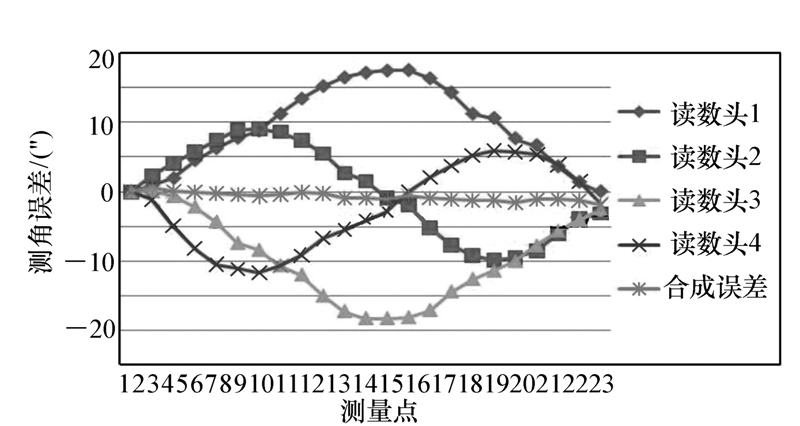
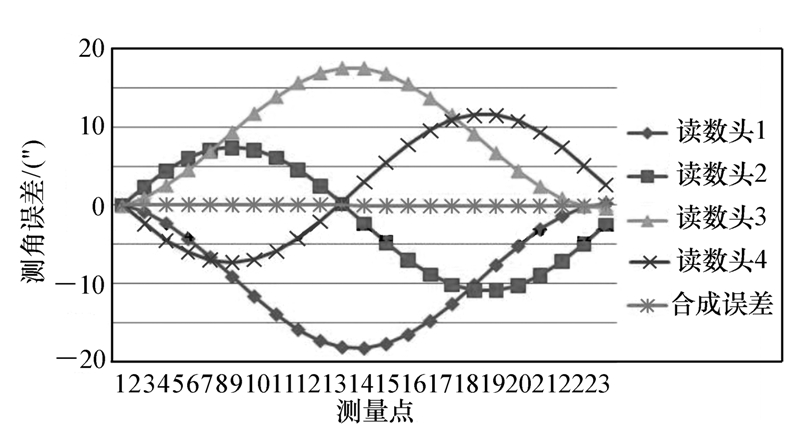
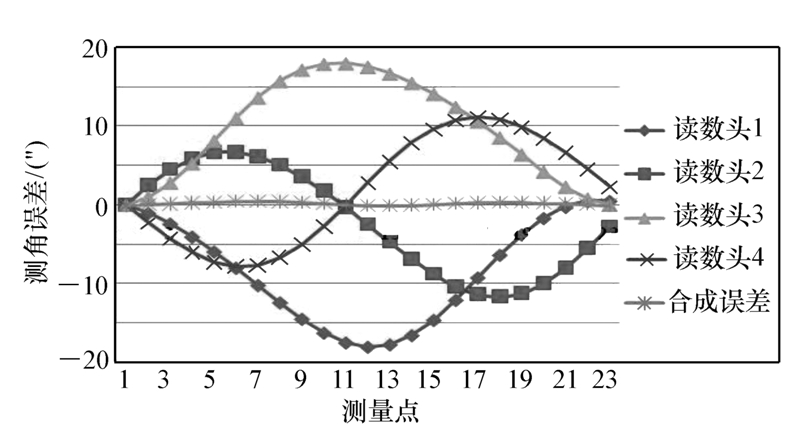
图 6 顺时针方向读数头测角误差一次谐波
Figure 6. First harmonic of angle measurement error for clockwise

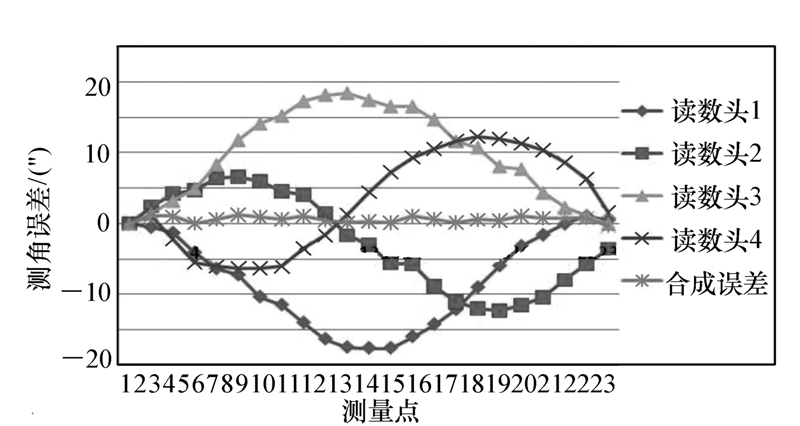
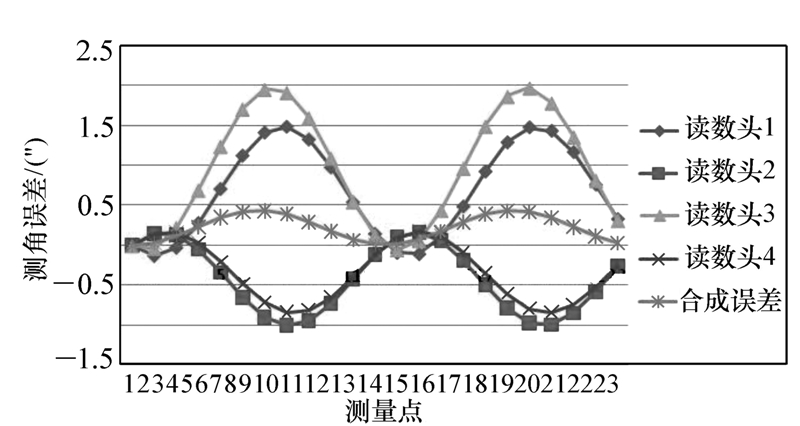
图 7 顺时针方向读数头测角误差二次谐波
Figure 7. Second harmonic of angle measurement error for clockwise
表 1 顺时针旋转不同读数头数目下的误差谐波幅值表
Table 1. Harmonic amplitude of different reading heads for clockwise rotation
 下载: 导出CSV
下载: 导出CSV
表 2 初相位理论差值与实际差值比较表
Table 2. Comparative sheet between theoretical and practical difference of initial phase
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] -

 下载:
下载:

计量
- 文章访问数: 2158
- HTML全文浏览量: 944
- PDF下载量: 793
- 被引次数: 0
