


Synchronized capture of 3D shape and color texture based on phase-shifting profilometry
doi: 10.37188/CO.EN-2025-0014
-
摘要:
近年来,文化遗产保护、医疗等多个领域对物体三维(3D)形貌与颜色纹理同步获取的需求持续攀升。为响应当前技术需求,本文提出了一种三维形貌与颜色纹理同步捕获的新方法,首先构建了相机曝光时间与灰度值关联的线性模型;随后通过曝光时间校准,使投影红绿蓝(RGB)光与单色相机捕获的白光灰度值趋于一致;接着向物体投射三组彩色条纹,以筛选适用于3D重建的最优像素;同时投射三张纯色图像,通过图像合成获得颜色纹理。实验结果表明,该方法能够有效实现三维形貌与颜色纹理的同步获取,且测量速度快,精度高,同时使用黑白相机避免了彩色物体三维重建过程中常见的颜色串扰等问题的干扰。
Abstract:In recent years, the demand for synchronous acquisition of three-dimensional (3D) shape and color texture has surged in fields such as cultural heritage preservation and healthcare. Addressing this need, this paper proposes a novel method for simultaneous 3D shape and color texture capture. First, a linear model correlating camera exposure time with grayscale values is established. Through exposure time calibration, the projected red, green and blue (RGB) light and white-light grayscale values captured by a monochrome camera are aligned. Then, three sets of color fringes are projected onto the object to identify optimal pixels for 3D reconstruction. And, three pure-color patterns are projected to synthesize the color texture. Experimental results show that this method effectively achieves synchronous 3D shape and color texture acquisition, offering high speed and precision. And using a monochrome camera avoids color crosstalk interference common in 3D reconstruction of colored objects.
-
Key words:
- three-dimensional shape /
- monochrome camera /
- RGB light projection.
-
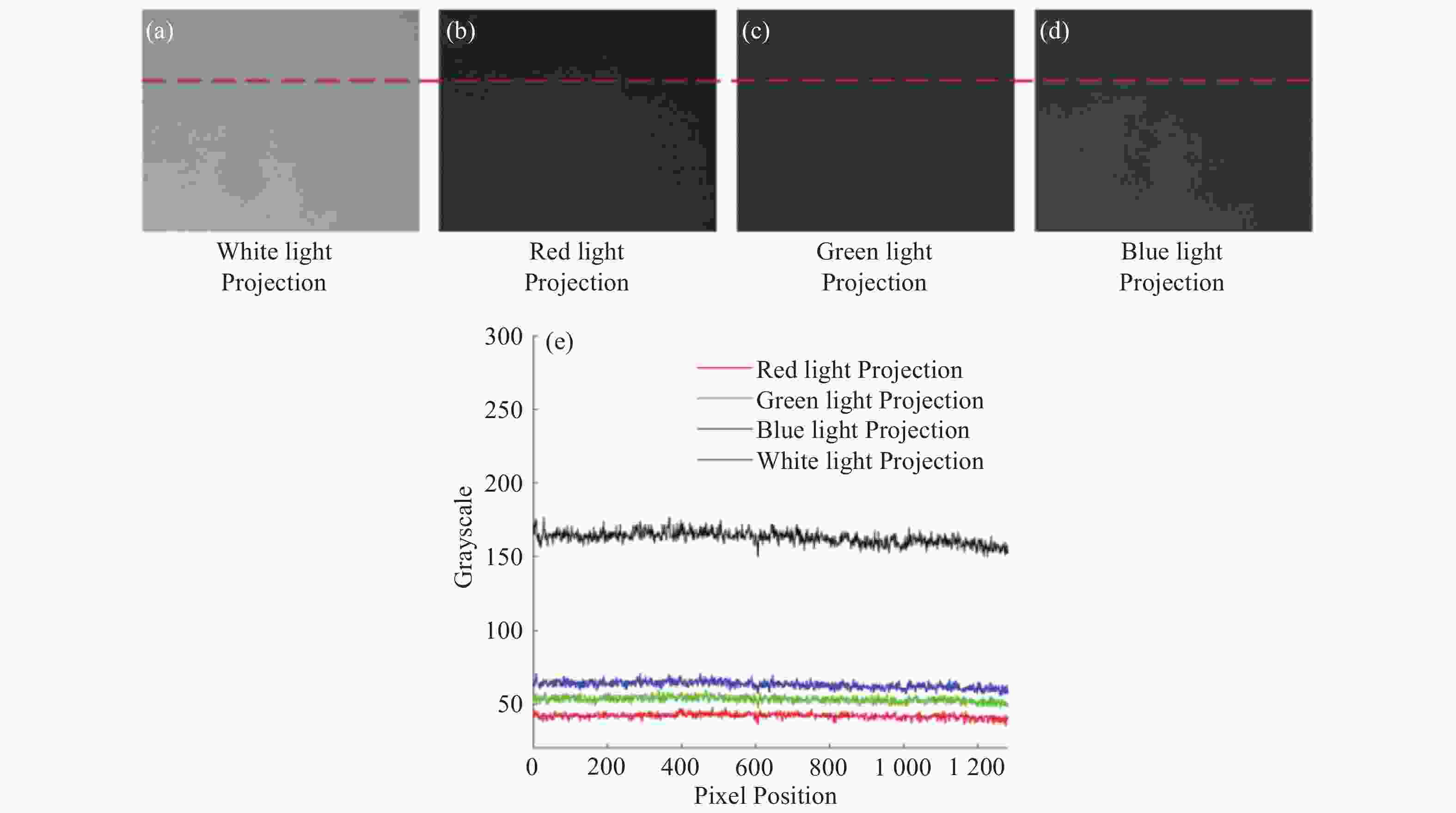
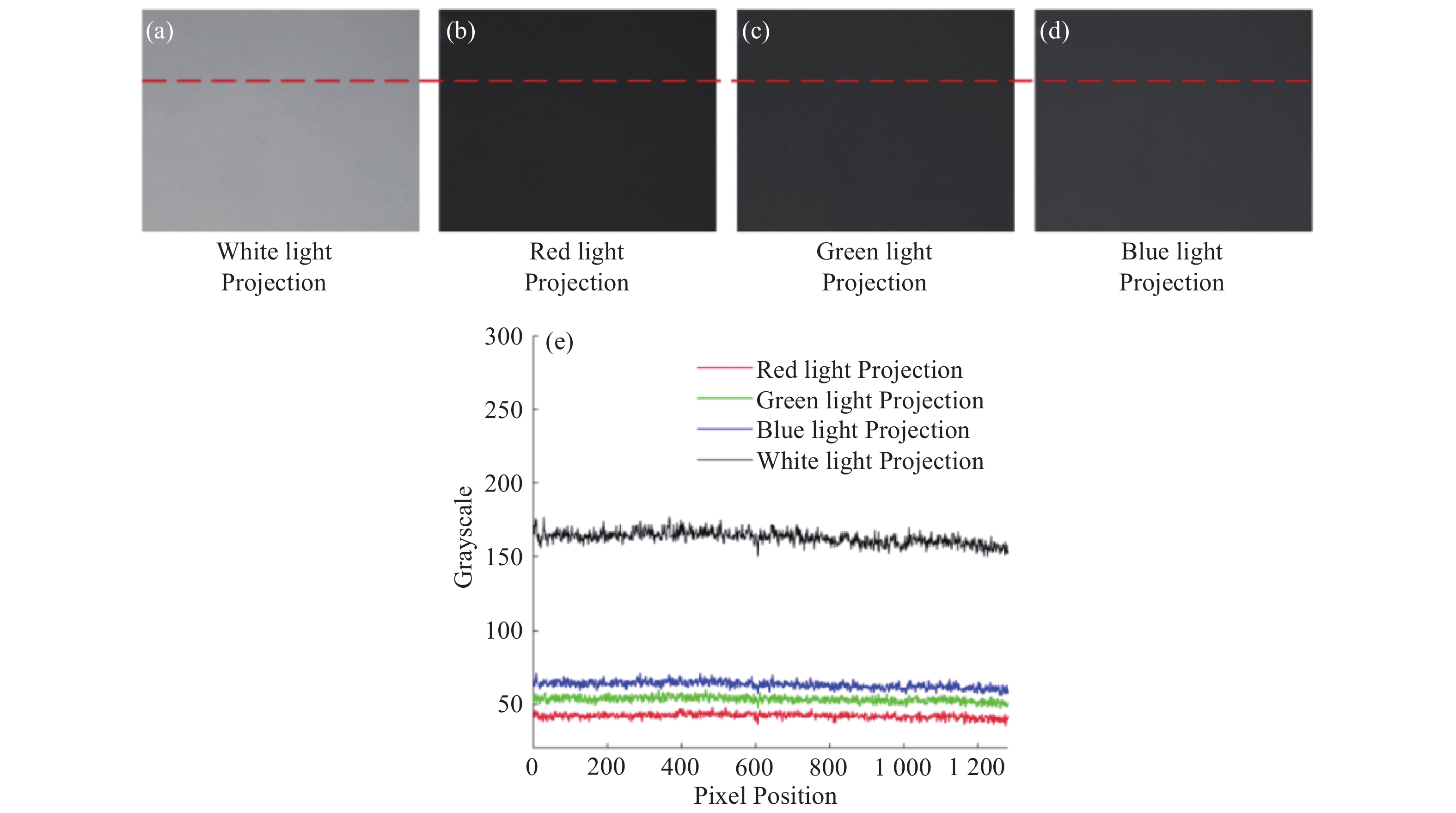
Figure 4. Images captured using white light and RGB light projection. (a) Image of a whiteboard under white light projection. (b) Image of a whiteboard under red light projection. (c) Image of a whiteboard under green light projection. (d) Image of a whiteboard under blue light projection. (e) Grayscale values of the rows corresponding to the locations of the red dotted lines in Fig. 4(a)-(d).
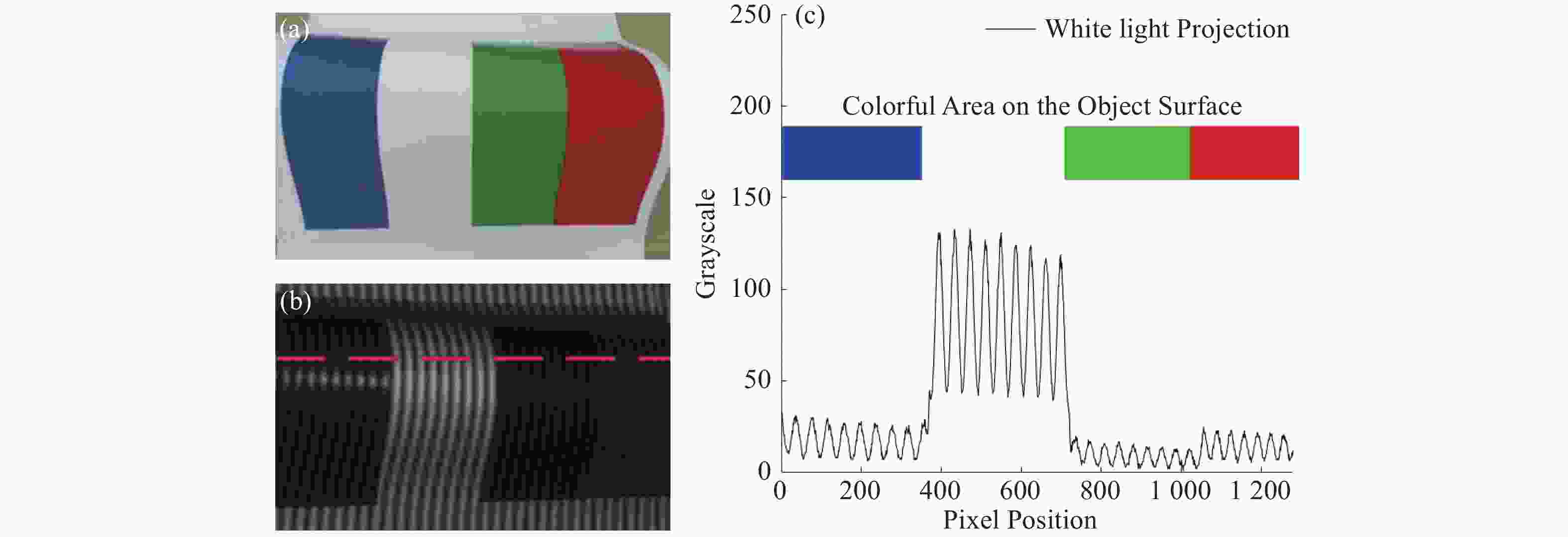
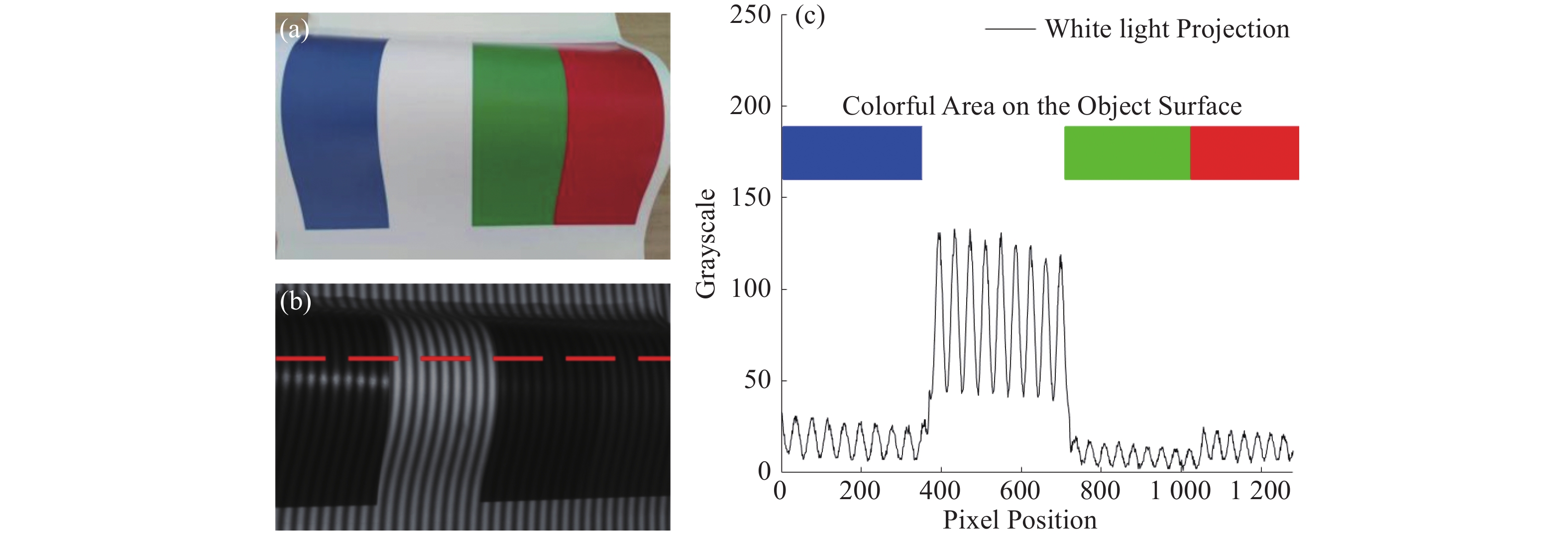
Figure 5. Contrast and brightness of the captured image. (a) The object being measured. (b) The object being measured under white light projection. (c) Grayscale values of the pixels in the row corresponding to the red dashed line in Fig. 5(b).
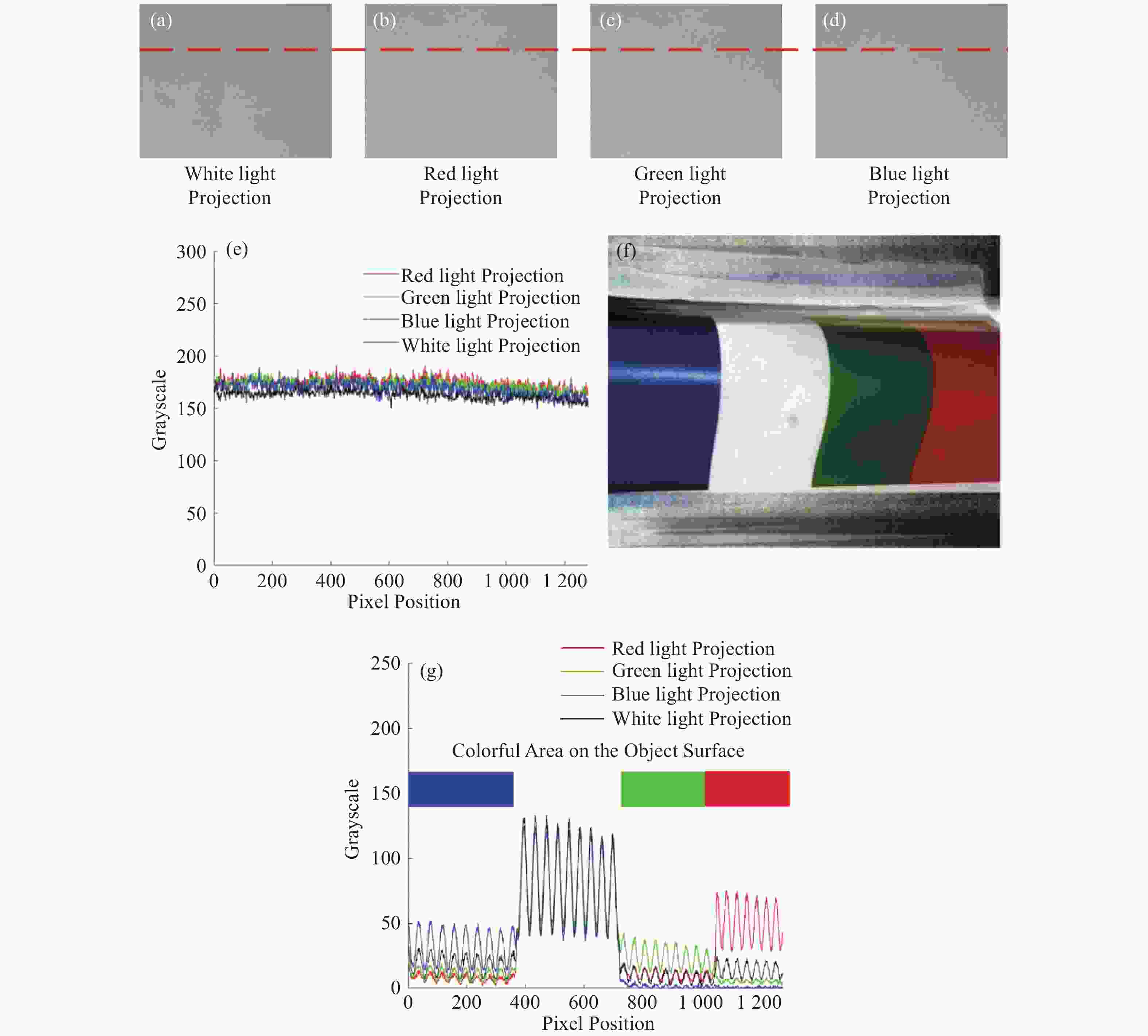
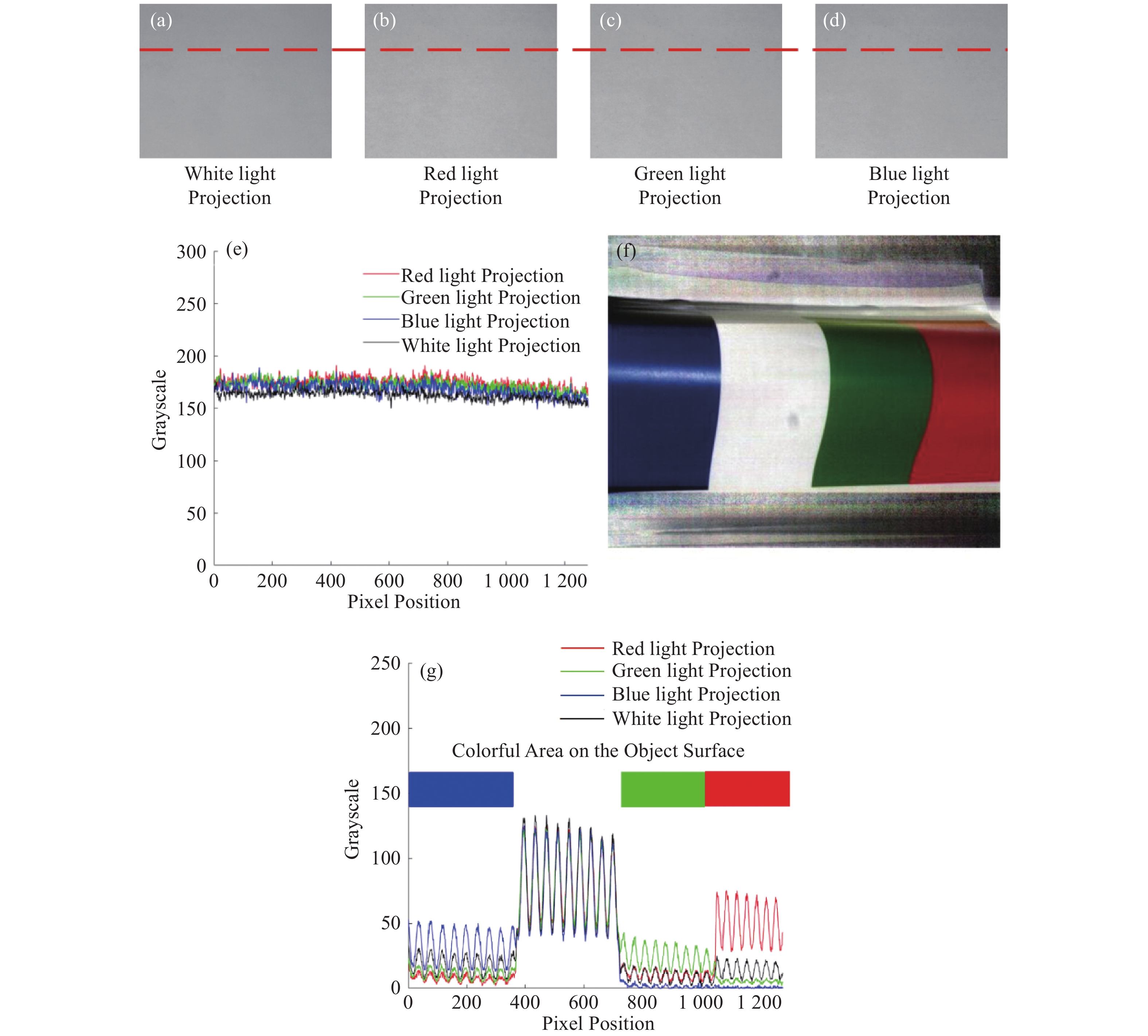
Figure 7. Grayscale values and color texture of the image after adjusting the exposure time. (a) Image of the whiteboard captured using white light projection after adjusting the exposure time. (b) Image of the whiteboard captured using red light projection after adjusting the exposure time. (c) Image of the whiteboard captured using green light projection after adjusting the exposure time. (d) Image of the whiteboard captured using blue light projection after adjusting the exposure time. (e) The grayscale values of the rows corresponding to the locations of the red dotted lines in Figs. 7 (a)-(d). (f) The color texture of the captured measured object. (g) The extraction of grayscale values from the row indicated by the red dashed line in Fig. 7(d) under both white light and RGB light projections.
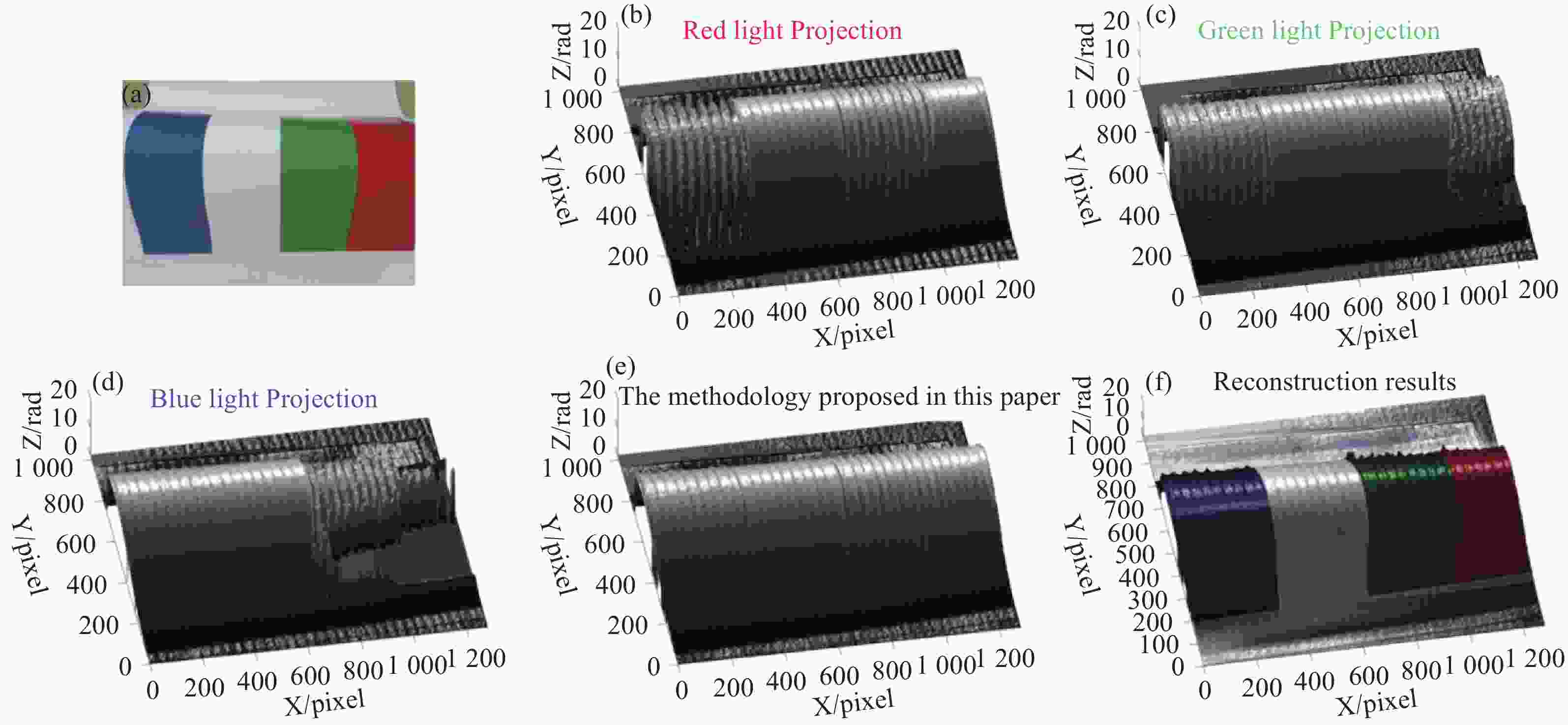
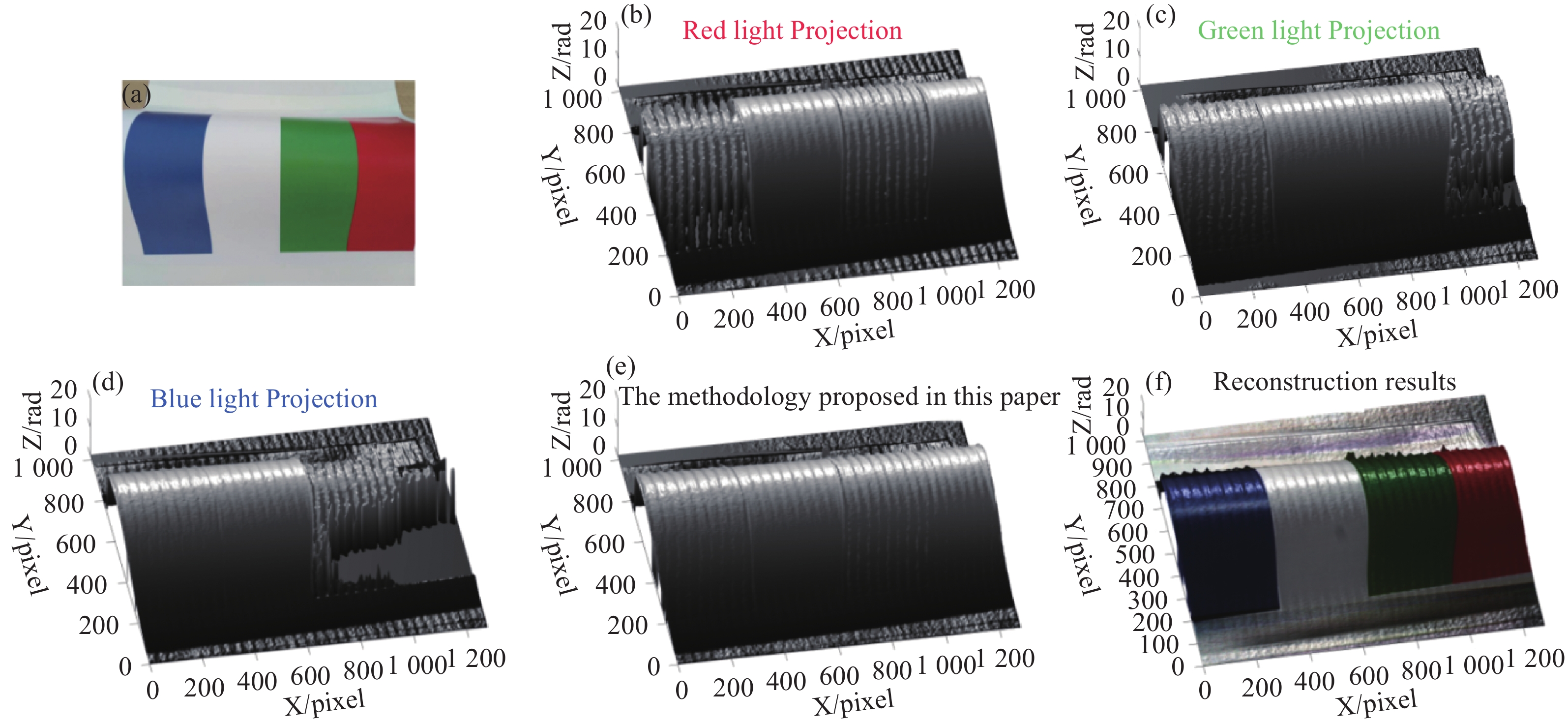
Figure 9. Reconstructed object surface. (a) The measured object. (b) Reconstructed object surface under red light projection. (c) Reconstructed object surface under green light projection. (d) Reconstructed object surface under blue light projection. (e) Reconstructed object surface using the proposed method. (f) Reconstructed object surface with color texture.
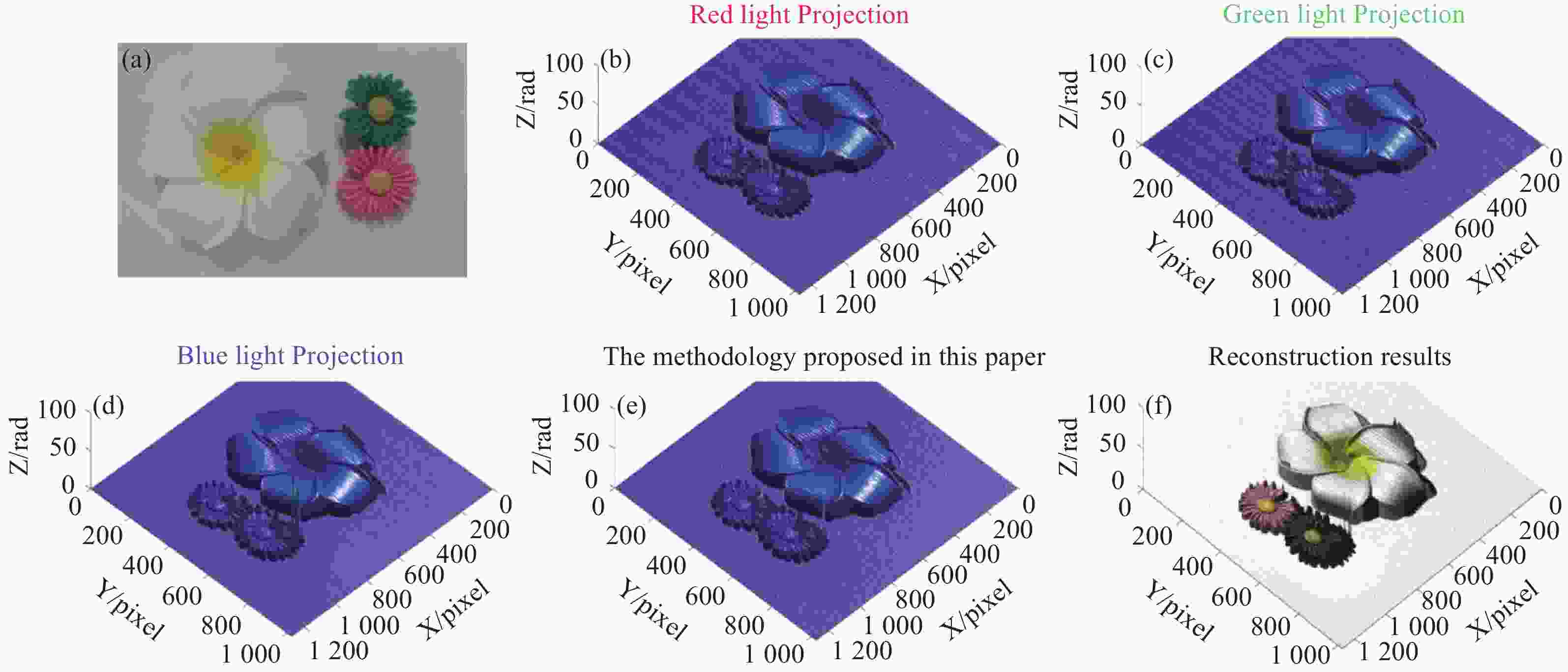
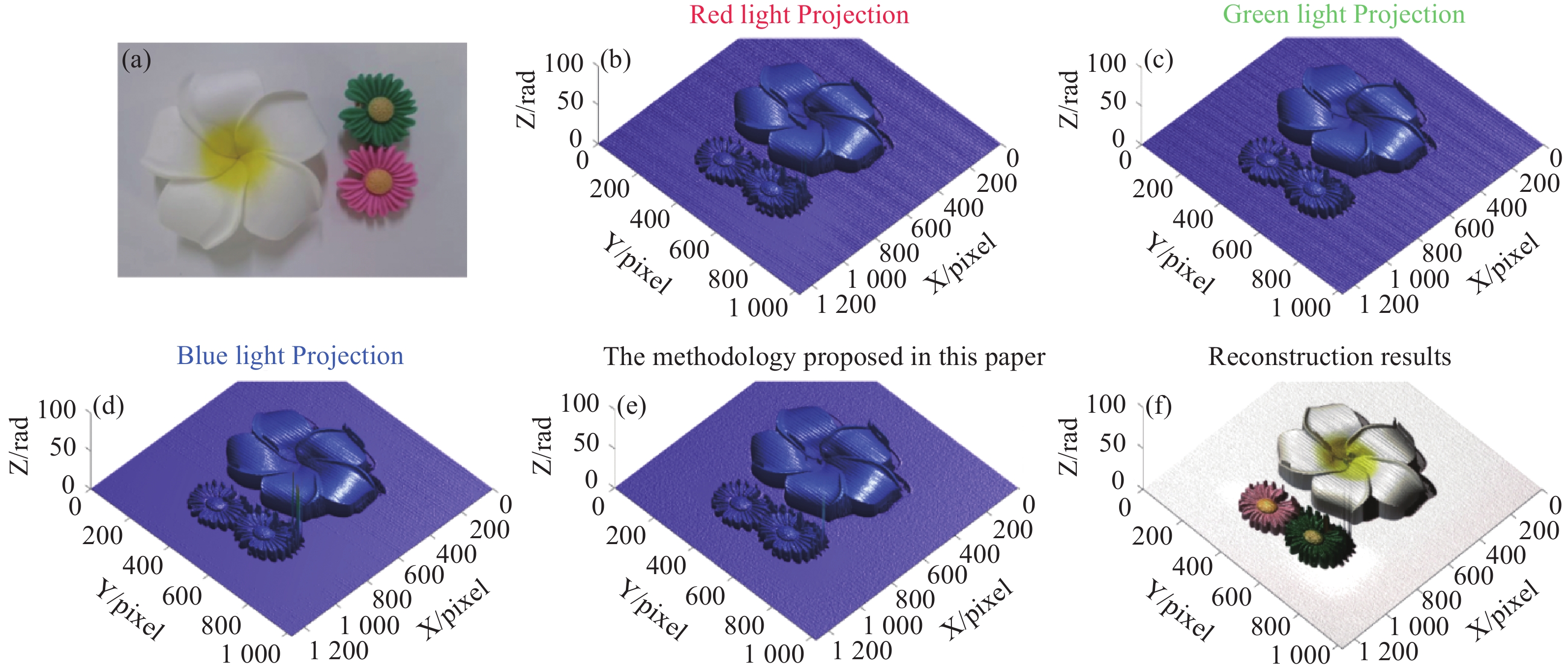
Figure 10. Results of 3D reconstruction of the object surface. (a) The measured object. (b) Reconstructed object surface under red light projection. (c) Reconstructed object surface under green light projection. (d) Reconstructed object surface under blue light projection. (e) Reconstructed object surface using the proposed method. (f) Reconstructed object surface with color texture.
-
[1] ZUO CH, ZHANG X L, HU Y, et al. Has 3D finally come of age? – An introduction to 3D structured-light sensor[J]. Infrared and Laser Engineering, 2020, 49(3): 0303001. (in Chinese). doi: 10.3788/IRLA202049.0303001 [2] LIU ZH H, DAI ZH R, TIAN SH L, et al. A review of non-contact 3D reconstruction techniques[J]. Science Technology and Engineering, 2022, 22(23): 9897-9908. (in Chinese). doi: 10.3969/j.issn.1671-1815.2022.23.001 [3] WU ZH J, ZHANG Q C. High-speed 3D topography measurement based on fringe projection: a review[J]. Laser & Optoelectronics Progress, 2023, 60(8): 0811001. (in Chinese). [4] YE Y P, HAO S Y, SONG ZH, et al. A novel triangular stereo model for 3D reconstruction of uniaxial MEMS-based structured light system[J]. Optics and Lasers in Engineering, 2023, 166: 107596. doi: 10.1016/j.optlaseng.2023.107596 [5] ZHANG Q H, LI H, LV L, et al. 3D reconstruction of the moving object with double-shooting based on phase shifting profilometry[J]. Infrared and Laser Engineering, 2023, 52(12): 20220891. (in Chinese). doi: 10.3788/IRLA20220891 [6] WANG J H, YANG Y X. Phase extraction accuracy comparison based on multi-frequency phase-shifting method in fringe projection profilometry[J]. Measurement, 2022, 199: 111525. doi: 10.1016/j.measurement.2022.111525 [7] LAI X, LI Y Y, ZHANG Q C. Background-extracted extended Kalman filter-based phase shift estimation algorithm for phase shifting profilometry system[J]. Optics & Laser Technology, 2024, 170: 110270. [8] VAN DER JEUGHT S, DIRCKX J J J. Real-time structured light profilometry: a review[J]. Optics and Lasers in Engineering, 2016, 87: 18-31. doi: 10.1016/j.optlaseng.2016.01.011 [9] ZHANG S. High-speed 3D shape measurement with structured light methods: a review[J]. Optics and Lasers in Engineering, 2018, 106: 119-131. [10] BARONE S, NERI P, PAOLI A, et al. 3D acquisition and stereo-camera calibration by active devices: a unique structured light encoding framework[J]. Optics and Lasers in Engineering, 2020, 127: 105989. doi: 10.1016/j.optlaseng.2019.105989 [11] LIN H, GAO J, MEI Q, et al. Adaptive digital fringe projection technique for high dynamic range three-dimensional shape measurement[J]. Optics Express, 2016, 24(7): 7703-7718. doi: 10.1364/OE.24.007703 [12] LI B, WEI X L, LIU B, et al. 3D colored object reconstruction from a single view image through diffusion[J]. Expert Systems with Applications, 2024, 252: 124225. doi: 10.1016/j.eswa.2024.124225 [13] LI H Y, LI Y, WANG H. A method for fast acquiring three-dimensional shape and color texture[J]. Acta Photonica Sinica, 2016, 45(1): 0112003. (in Chinese). doi: 10.3788/gzxb20164501.0112003 [14] SUN Y B, LIU Z W, WANG Y, et al. Im2Avatar: colorful 3D reconstruction from a single image[Z]. arXiv preprint arXiv: 1804.06375, 2020. (查阅网上资料, 请作者核对文献类型及格式是否正确). [15] ZHANG Y N, QIAO D Y, XIA CH F, et al. A method for high dynamic range 3D color modeling of objects through a color camera[J]. Machine Vision and Applications, 2023, 34(1): 6. doi: 10.1007/s00138-022-01355-1 [16] XU M, ZHANG Y, WANG N, et al. Single-shot 3D shape reconstruction for complex surface objects with colour texture based on deep learning[J]. Journal of Modern Optics, 2022, 69(16): 941-956. doi: 10.1080/09500340.2022.2101701 [17] ZHU Y ZH, ZHANG Y P, FENG Q SH. Colorful 3D reconstruction from a single image based on deep learning[C]. Proceedings of the 2020 3rd International Conference on Algorithms, Computing and Artificial Intelligence, ACM, 2020: 25. [18] ZHANG Z H, LIAN X J, GAO N. Crosstalk elimination method for color composite fringe projection measuring systems[J]. Acta Optica Sinica, 2018, 38(8): 0815005. (in Chinese). doi: 10.3788/AOS201838.0815005 [19] BAI X F, ZHANG Z H. 3D shape measurement based on colour fringe projection techniques[J]. Chinese Journal of Scientific Instrument, 2017, 38(8): 1912-1925. (in Chinese). doi: 10.3969/j.issn.0254-3087.2017.08.009 [20] LIU SH, ZHANG Z H, GAO N, et al. Elimination method of crosstalk and chromatic aberration between color channels for composite surface measurement[J]. Opto-Electronic Engineering, 2023, 50(4): 220340. (in Chinese). doi: 10.12086/oee.2023.220340 [21] WANG J H, YANG Y X. High-speed three-dimensional measurement technique for object surface with a large range of reflectivity variations[J]. Applied Optics, 2018, 57(30): 9172-9182. doi: 10.1364/AO.57.009172 [22] WANG J H, ZHOU Y G, YANG Y X. Rapid 3D measurement technique for colorful objects employing RGB color light projection[J]. Applied Optics, 2020, 59(7): 1907-1915. doi: 10.1364/AO.382302 -

 下载:
下载:

计量
- 文章访问数: 10
- HTML全文浏览量: 1
- PDF下载量: 0
- 被引次数: 0
