


Analyse of pointing and tracking error with three concentric spheres optical system
-
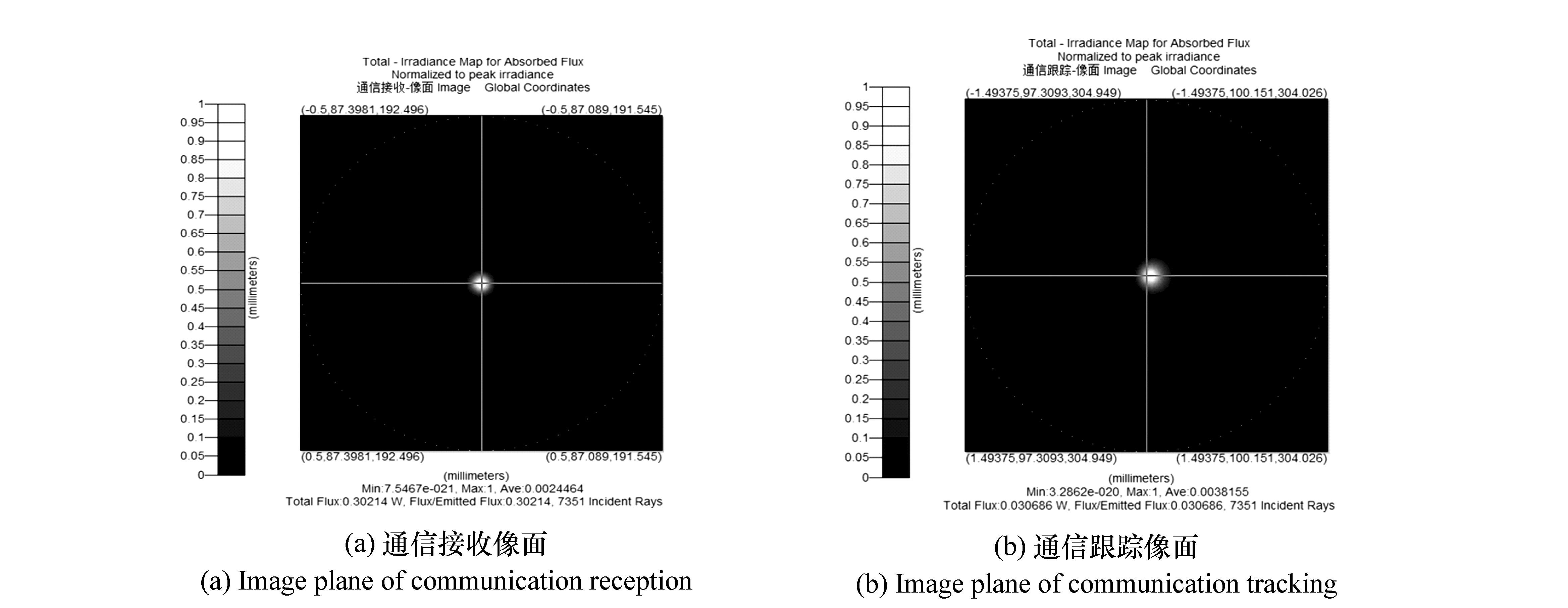
摘要: 针对独有的跟踪方式,具体讨论了激光通信三同心球光学系统的跟瞄方案,并进行了具体规划。通过对通信跟踪光路和通信接收光路的视场和精度分析,给出了二者的相关参数,作为Matlab理论计算跟踪像面轨道的依据。利用Tracepro软件模拟了引入相关误差量后的通信跟踪和通信接收像面光斑质心偏移和光斑大小变化情况。仿真结果显示:随着角度的旋转,通信接收的质心偏差在±4 μm范围内,通信跟踪的质心偏差在±50 μm范围内;通信接收像面光斑直径小于80 μm,通信跟踪像面光斑直径均在400 μm以内。系统所引入的误差在允许范围之内,不影响相关跟踪通信功能。Abstract: According to unique tracking mode, the specific tracking program of three concentric spherical optical system which used in laser communication is discussed. By analyzing field of view and precision in the communication tracking optical path and the communication receiving optical path, the main relating parameters are given on the basis of theoretical calculation of tracking trajectory with Matlab. Using the software of Tracepro, the optical simulation of spot centroid and spot size of image plane in communication tracking optical path and the communication receiving optical path are performed after the introduction of relevant error. The simulation results show that centroid deviation of communication reception and communication tracking are in the ranges of ±4 μm and ±50 μm, respectively. Spot diameter deviation of communication reception and communication tracking are less than 80 μm and 400 μm respectively, which do not affect the relating function on tracking and communicating.
-

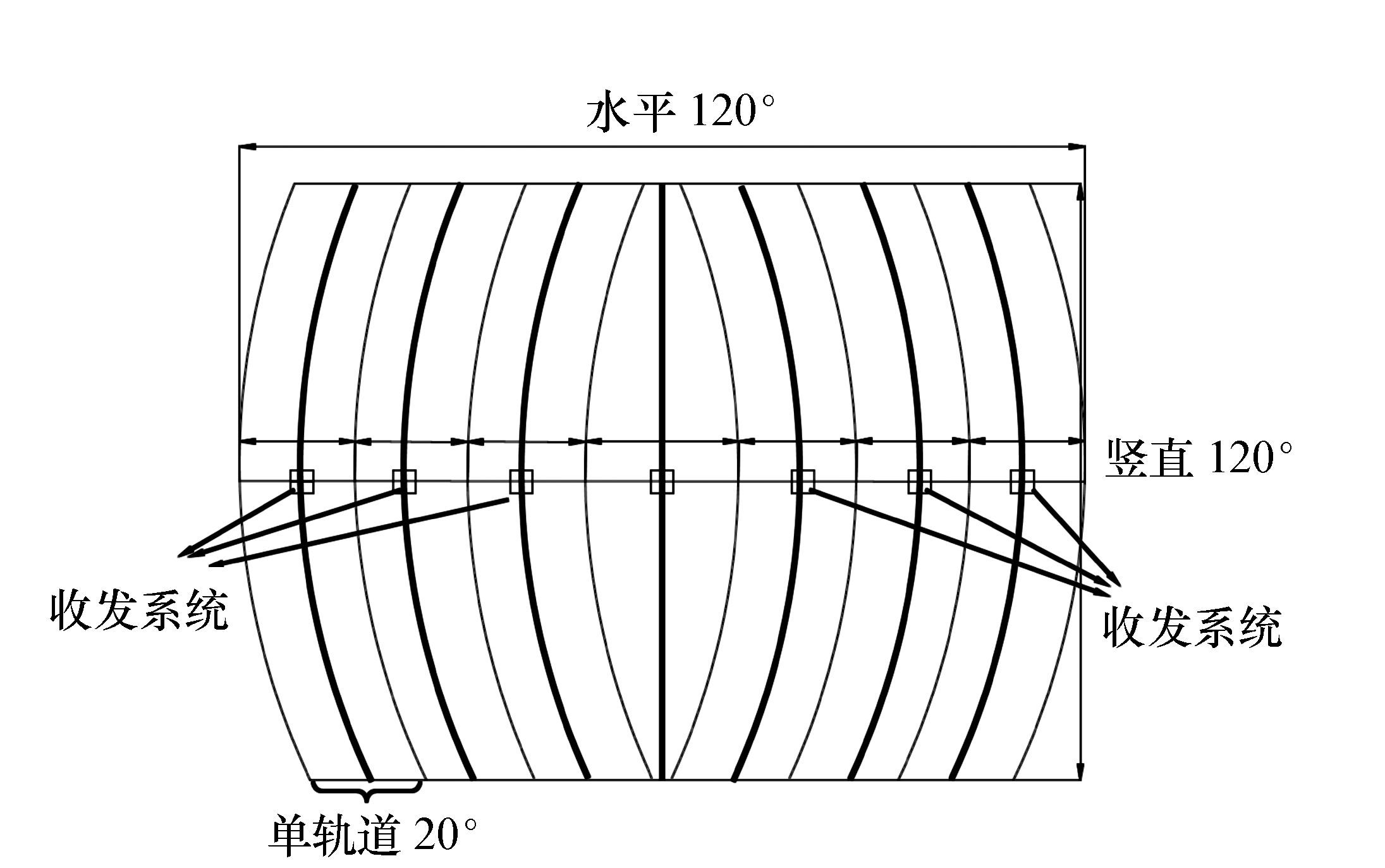
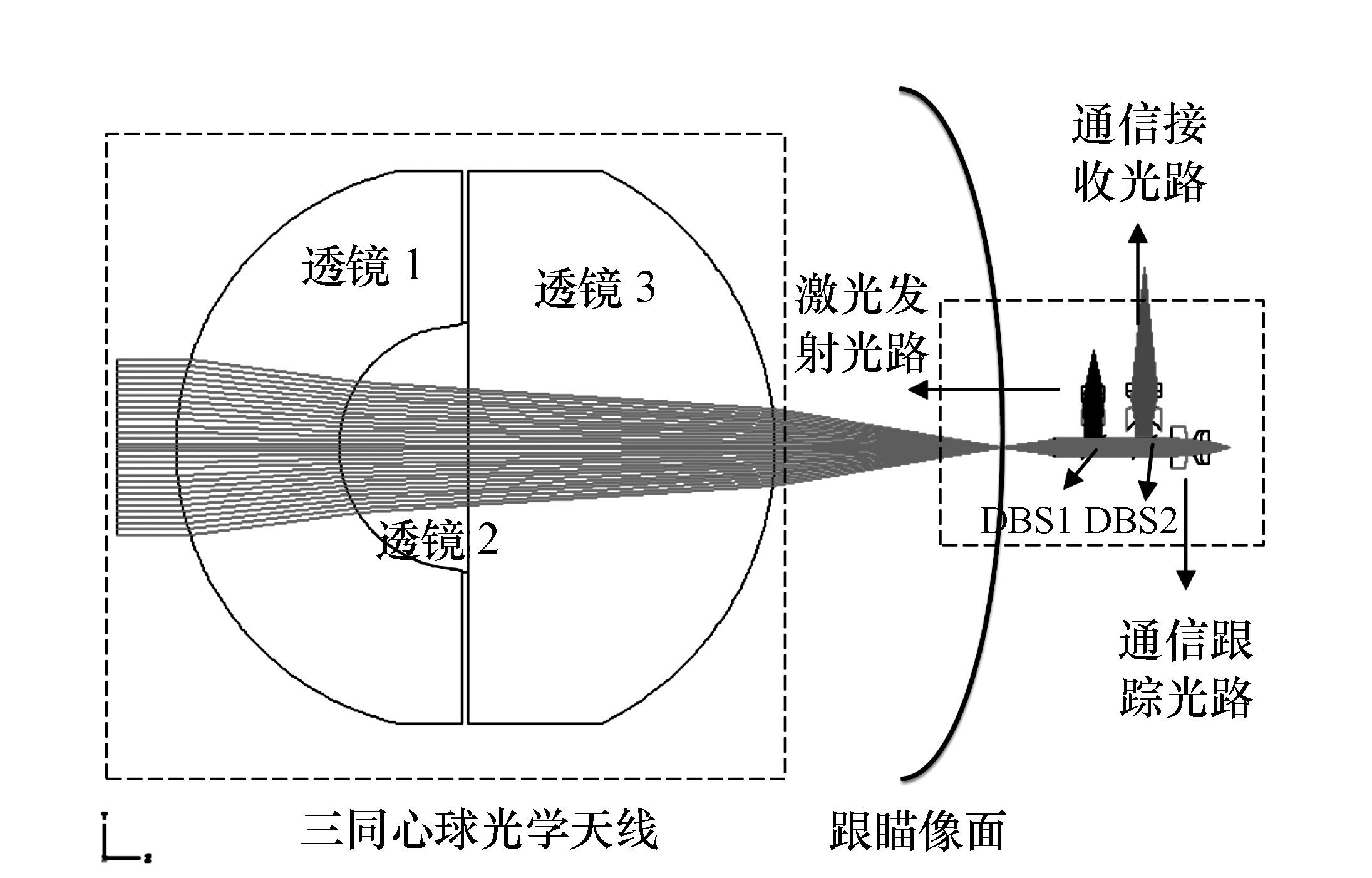
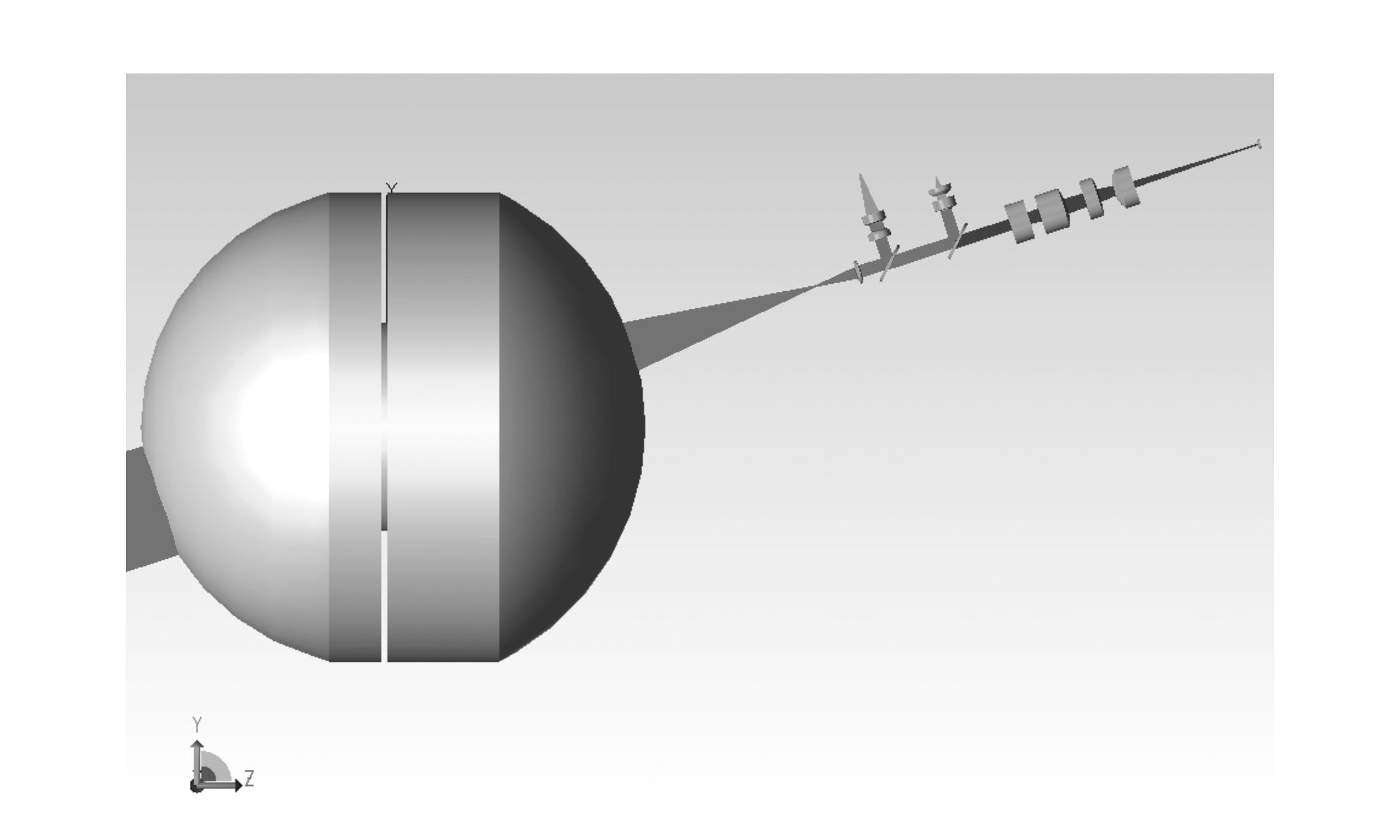
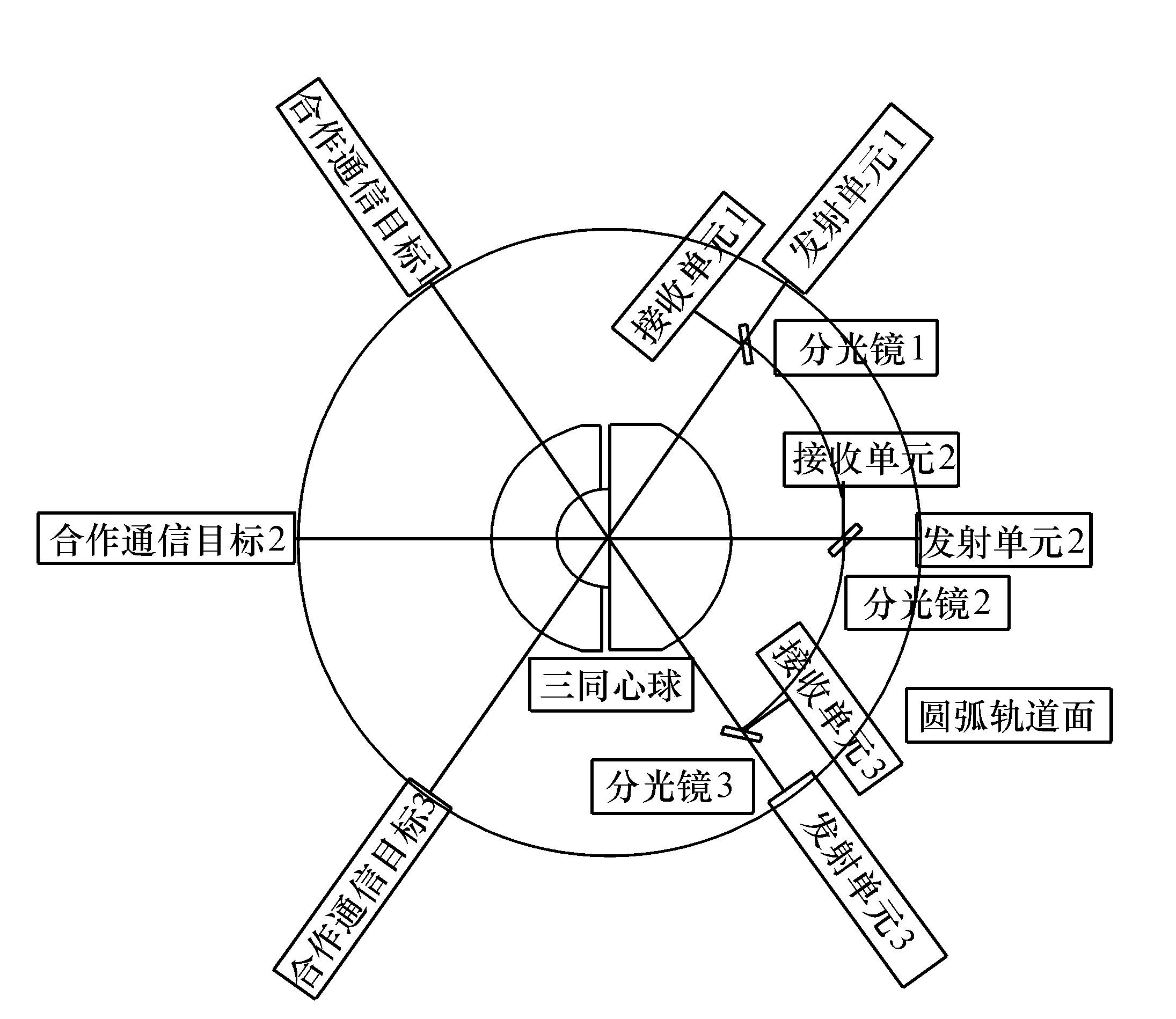
图 1 三同心球天线结构总体方案示意图
Figure 1. Schematic diagram of antenna structure with three concentric sphere

图 5 18°下通信跟踪和通信接收像面
Figure 5. Image planes of communication reception and communication tracking under 18 degree

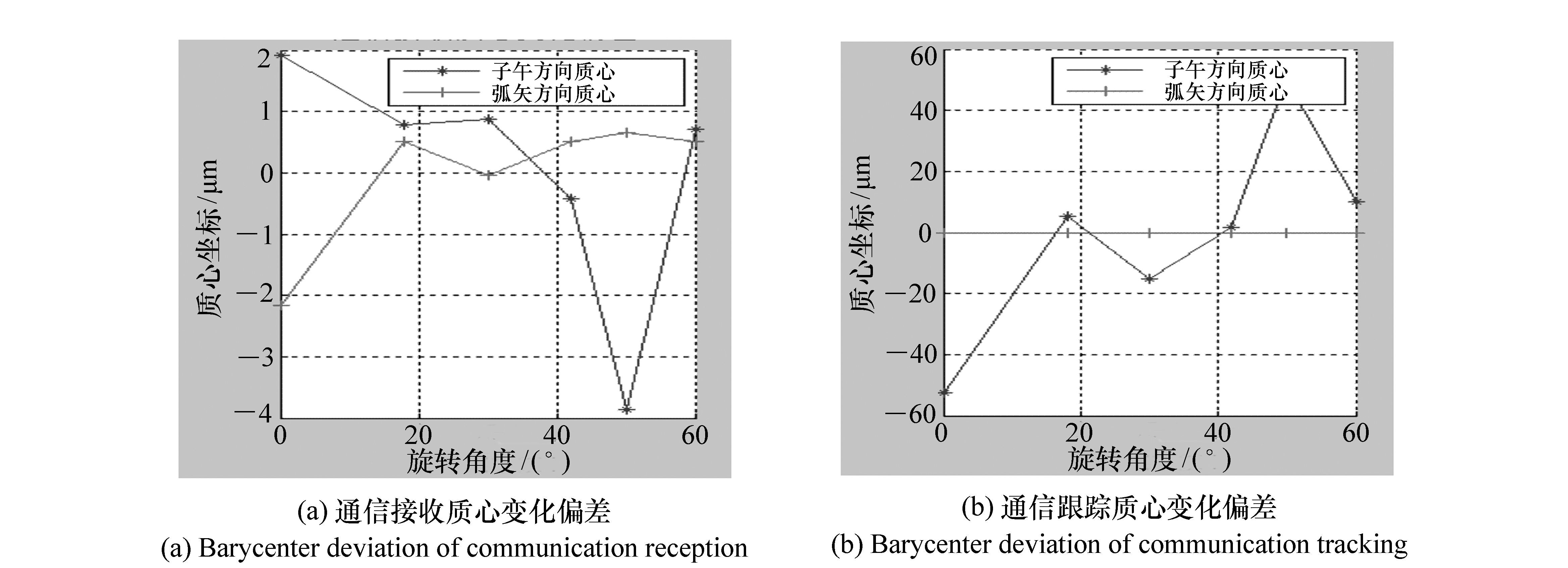
图 6 通信接收及通信跟踪光斑质心变化偏差图
Figure 6. Barycenter deviation of communication reception and communication tracking
表 1 三同心球光学系统参数表
Table 1. Parameters of three concentric sphere system
分系统名称 指标 参数 三同心球光路 视场/(°) 120 像面半径/mm 158.4 通信跟踪光路 视场/mrad 3 跟踪精度/μrad 100 通信接收光路 视场/mrad 1.5  下载: 导出CSV
下载: 导出CSV
表 2 不同角度下的轨道半径偏离表
Table 2. Orbit radius deviation under the different angles
X坐标 Y坐标 跟踪面轨道半径/mm 0° 0 158.043 2 158.043 1 18° 48.863 5 150.386 5 158.125 7 30° 79.134 5 137.064 9 158.268 9 42° 106.041 0 117.770 4 158.475 7 50° 121.538 7 101.974 7 158.644 4 60° 137.597 7 79.442 1 158.884 2 平均值 / / 158.407 0
下载: 导出CSV
表 3 通信接收和通信跟踪光斑中心偏差
Table 3. Light spot center deviation of communication reception and communication tracking
角度/(°) 通信接收光路像面 通信跟踪光路像面 子午偏差/μm 弧矢偏差/μm 子午偏差/μm 弧矢偏差/μm 0 1.92 -2.15 -52.32 0 18 0.79 0.51 5.39 0 30 0.87 -0.04 -15.09 0 42 -0.42 0.51 1.78 0 50 -3.86 0.66 50.02 0 60 0.70 0.51 10.23 0
下载: 导出CSV
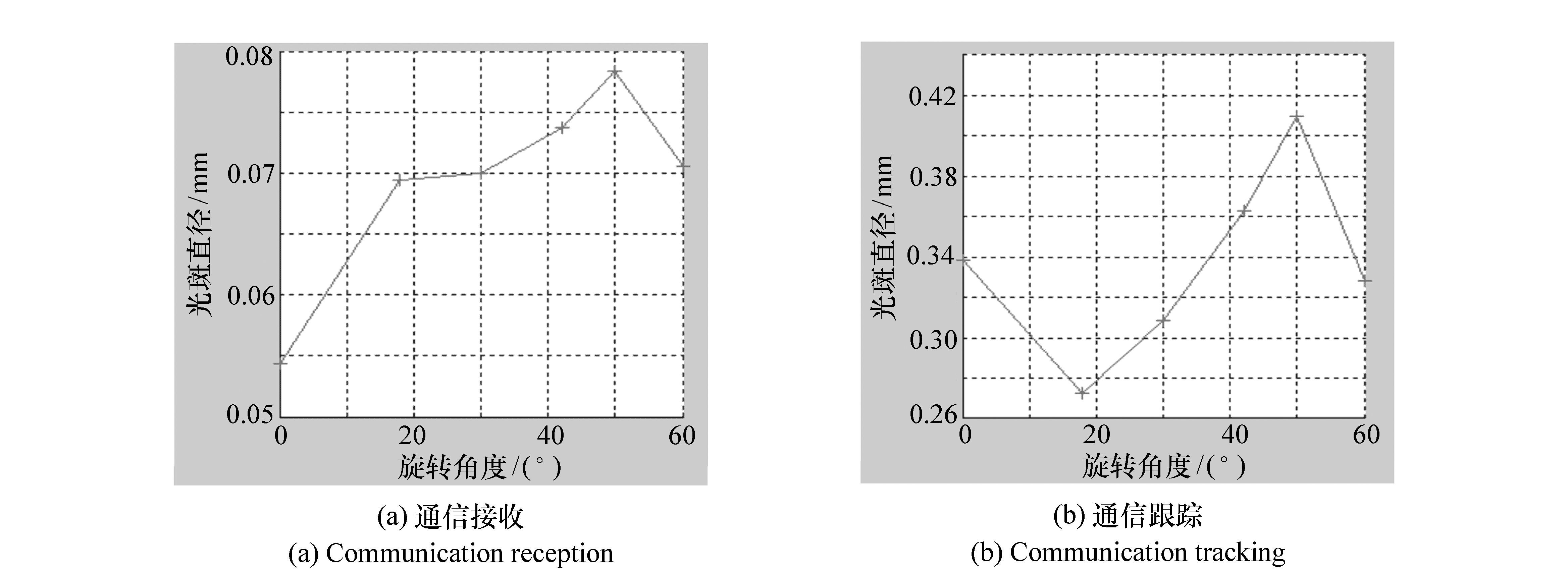
表 4 通信接收和通信跟踪光斑大小偏差
Table 4. Light spot deviation of communication reception and communication tracking
角度/(°) 通信接收光斑直径/mm 通信跟踪光斑直径/mm 0 0.054 3 0.338 7 18 0.069 4 0.272 3 30 0.070 0 0.308 4 42 0.073 8 0.362 6 50 0.078 4 0.409 7 60 0.070 5 0.328 2
下载: 导出CSV
-
[1] 姜会林,安岩,张雅琳,等.空间激光通信现状、发展趋势及关键技术分析[J].飞行器测控学报,2014,34(3):207-217. http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201503001.htmJIANG H L,AN Y,ZHANG Y L,et al.. Analysis of the status quo, development trend and key technology of space laser communication[J]. J. Spacecraft TT&C Technology,2014,34(3):207-217.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201503001.htm [2] 张靓,郭丽红,刘向南,等.空间激光通信技术最新进展与趋势[J].飞行器测控学报,2013,32(4):286-293. http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201304001.htmZHANG L,GUO L H,LIU X N,et al.. Latest progress and trends of development of space laser communication[J]. J. Spacecraft TT&C Technology,2013,32(4):286-293.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201304001.htm [3] 曾飞,高世杰,伞晓刚,等.机载激光通信系统发展现状与趋势[J].中国光学,2016,9(1):65-73. doi: 10.3788/co.ZENG F,GAO SH J,SAN X G,et al.. Development status and trend of airborne laser communication terminals[J]. Chinese Optics,2016,9(1):65-73.(in Chinese) doi: 10.3788/co. [4] 孟立新,赵丁选,张立中,等.机载激光通信中气动光学的影响及补偿[J].光学精密工程,2014,22(12):3231-3238. doi: 10.3788/OPE.MENG L X,ZHAO D X,ZHANG L ZH,et al.. Boundary layer effect compensation in airborne laser communication[J]. Opt. Precision Eng.,2014,22(12):3231-3238.(in Chinese) doi: 10.3788/OPE. [5] 张巍.激光对潜通信技术的发展分析[J].舰船电子工程,2014,34(4):4-7. http://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201404003.htmZHANG W. Development analysis of submarine laser communication technology[J]. Ship Electronic Engineering,2014,34(4):4-7.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201404003.htm [6] 高天元,胡源,姜会林,等.机载空间激光通信大气附面层影响及补偿技术研究[J].兵工学报,2015,36(12):2278-2283. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201512010.htmGAO T Y,HU Y,JIANG H L,et al.. The effect of atmosphere boundary layer on airborne space laser communication and its compensation technology[J]. Acta Armamentarll,2015,36(12):2278-2283.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201512010.htm [7] 姜会林,胡源,宋延嵩,等.空间激光通信组网光端机技术研究[J].航天返回与遥感,2011,32(5):52-59. http://www.cnki.com.cn/Article/CJFDTOTAL-HFYG201105011.htmJIANG H L,HU Y,SONG Y S,et al.. Research on space laser communication network[J]. Spacecraft Recovery Remote Sensing,2011,32(5):52-59.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HFYG201105011.htm [8] 姜会林,胡源,丁莹,等.空间激光通信组网光学原理研究[J].光学学报,2012,32(10):1006003. doi: 10.3788/AOSJIANG H L,HU Y,DING Y,et al.. Optical principle research of space laser communication network[J]. Acta Optica Sinica,2012,32(10):1006003.(in Chinese) doi: 10.3788/AOS [9] 王超,江伦,董科研,等.星地激光通信系统偏振特性分析[J].激光与光电子进展,2015,52:120607. http://www.cnki.com.cn/Article/CJFDTOTAL-JGDJ201512011.htmWANG CH,JIANG L,DONG K Y,et al.. Analysis of the polarization characteristic of a satellite-to-ground laser communication optical system[J]. Laser & Optoelectronics Progress,2015,52:120607.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JGDJ201512011.htm [10] 张雅琳,安岩,姜会林,等.空间激光通信一点对多点光学原理与方法比较研究[J].兵工学报,2016,37(1):165-171. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201601024.htmZHANG Y L,AN Y,JIANG H L,et al. A comparative research on optical principles and methods of one-point-to-multi-point space laser communication[J]. Acta Armamentarll,2016,37(1):165-171.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201601024.htm [11] 于笑楠,佟首峰,董岩,等.空间激光通信组网单光束跟踪子系统[J].光学精密工程,2014,22(2):3348-3353. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201412027.htmYU X N,TONG SH F,DONG Y,et al.. Single beam tracking subsystem of space laser communication network[J]. Opt. Precision Eng.,2014,22(2):3348-3353.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201412027.htm [12] 金光,李艳杰,钟兴,等.空间成像与激光通信共口径光学系统设计[J].光学精密工程,2014,22(8):2067-2074. doi: 10.3788/OPE.JIN G,LI Y J,ZHONG X,et al.. Design of co-aperture optical system for space imaging and laser communication[J]. Opt. Precision Eng.,2014,22(8):2067-2074.(in Chinese) doi: 10.3788/OPE. [13] 董登峰,周维虎,纪荣祎,等.激光跟踪仪精密跟踪系统的设计[J].光学精密工程,2016,24(2):309-318. doi: 10.3788/OPE.DONG D F,ZHOU W H,JI R Y,et al.. Design of precise tracking system of laser tracker[J]. Opt. Precision Eng.,2016,24(2):309-318.(in Chinese) doi: 10.3788/OPE. [14] 江伦,胡源,安岩,等.星载激光目标指示器光学系统研究[J].激光与红外工程,2016,46(5):542-546. http://www.cnki.com.cn/Article/CJFDTOTAL-JGHW201605007.htmJIANG L,HU Y,AN Y,et al.. Research on optical system of space borne laser target indicator[J]. Laser & Infrared,2016,46(5):542-546.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JGHW201605007.htm [15] 徐新行,刘廷霞,时魁,等.提高万向轴系式快速反射镜指向精度的装置[J].光学精密工程,2015,23(6):1689-1694. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201506025.htmXU X X,LIU T X,SHI K,et al.. Device for improving pointing precision of fast steering mirror with spherical gemel[J]. Opt. Precision Eng.,2015,23(6):1689-1694.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201506025.htm -

 下载:
下载:

计量
- 文章访问数: 1804
- HTML全文浏览量: 648
- PDF下载量: 489
- 被引次数: 0
