


Salient object detection based on multi-scale region contrast
-
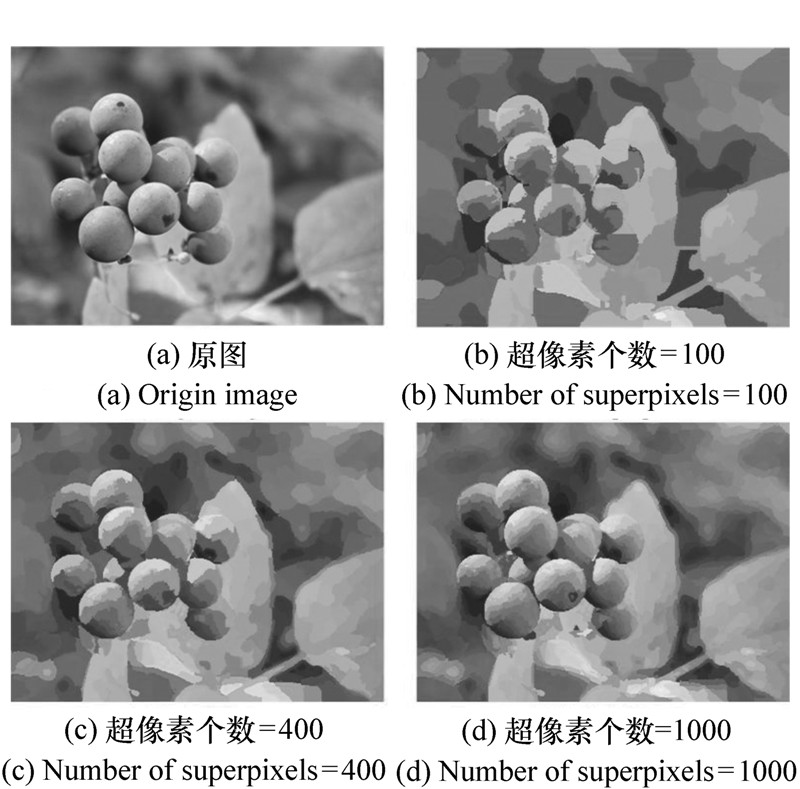
摘要: 为了对图像中的显著目标进行更精确的识别,提出一种新的基于多尺度区域对比的视觉显著性计算模型。首先基于多尺度思想将图像分别分割为不同数目的超像素,对超像素内的像素颜色值取平均以生成抽象化图像;然后根据显著特征的稀少性及显著特征的聚集性,计算单一尺度下超像素颜色特征的显著性值;最后通过取各尺度超像素显著度的平均值来融合多尺度显著图,得到最终的视觉显著图。实验表明,以MSRA图库中的1000张随机自然图片为例,该模型较现有较好的区域对比模型,显著目标识别的精确率提高了14.8%,F-Measure值提高了9.2%。与现有的算法相比,该模型提高了算法对显著目标大小的适应性,减少了背景对显著目标识别的干扰,具有更好的一致性,能更好地识别显著目标。Abstract: A novel visual saliency computing model is proposed based on multi-scale region contrast to perform more accurate detection on salient object.Firstly, the image is divided into different number of super-pixels based on multi-scale method, and the values of pixels in every super-pixel are averaged to create abstract image.Secondly, based on scarcity and aggregation, both of which are the characters of saliency, the color's saliency of super-pixel is computed in single scale.By averaging the salient images in every scale, the multi-scale salient images are fused and the final visual salient image is obtained in the end.The simulation result shows that with 1000 random nature images in the MSRA Libraries, the model improves the precision ratio of salient object detection by 14.8% and F-Measure value by 9.2%, compared with current well-performed region contrast model.The model improves the adaptability of the size of salient objects, and reduces the disturbance of background.It performs better consistency and has better ability to recognize salient object in comparison with current algorithms.
-
Key words:
- salient object detection /
- visual saliency computing model /
- multi-scale
-

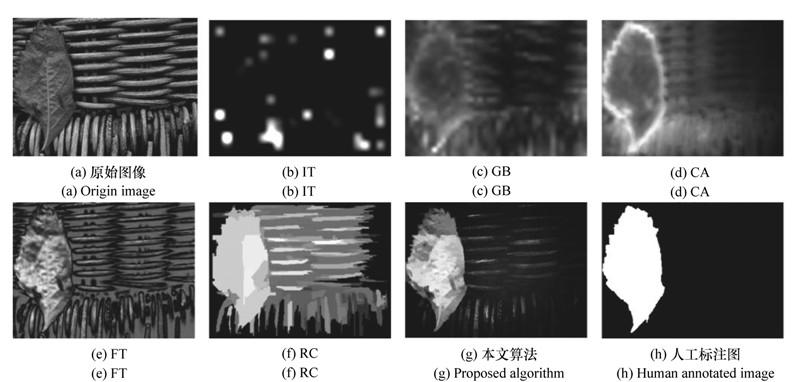
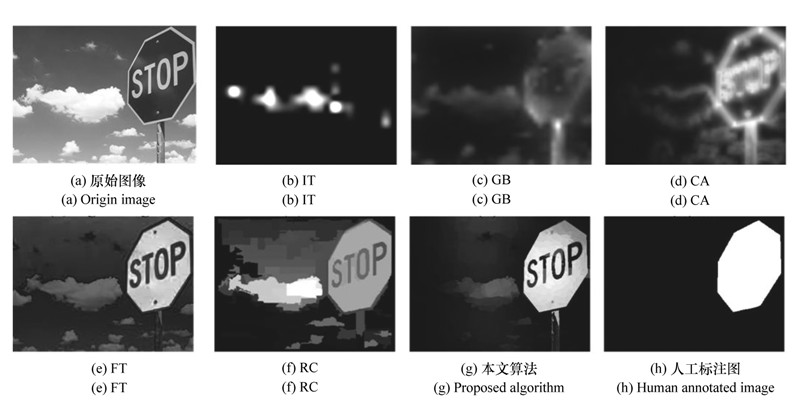
图 7 6种算法的显著图及人工标注图 1
Figure 7. Saliency maps obtained by using six different algorithms and human annotated image 1

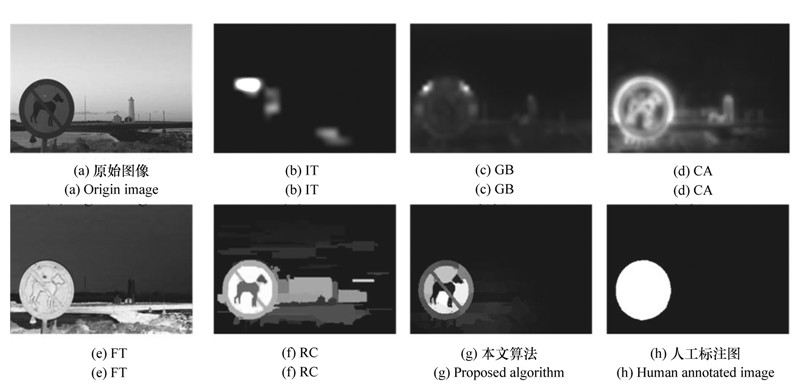
图 8 6种算法的显著图及人工标注图 2
Figure 8. Saliency maps obtained by using six different algorithms and human annotated image 2

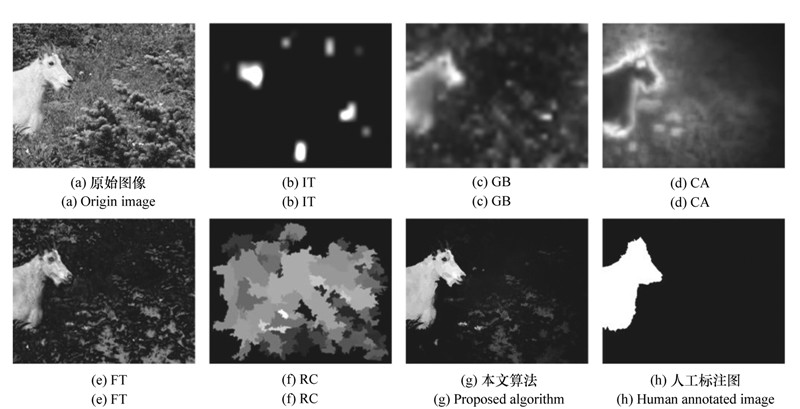
图 9 6种算法的显著图及人工标注图 3
Figure 9. Saliency maps obtained by using six different algorithms and human annotated image 3

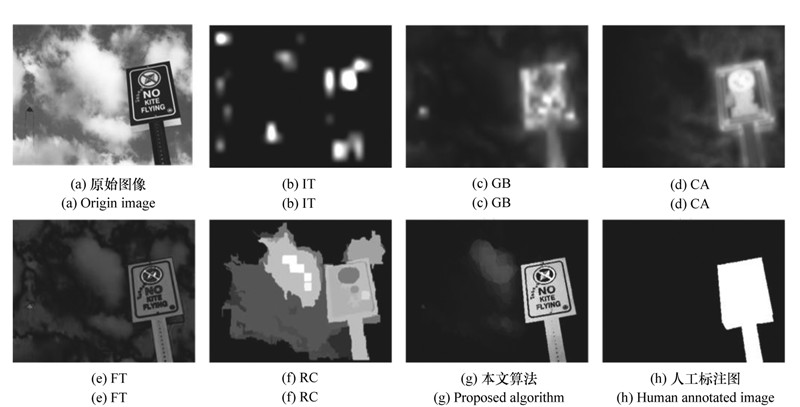
图 10 6种算法的显著图及人工标注图 4
Figure 10. Saliency maps obtained by using six different algorithms and human annotated image 4

图 11 6种算法的显著图及人工标注图 5
Figure 11. Saliency maps obtained by using six different algorithms and human annotated image 5
表 1 6种算法的平均精确率、召回率及F-Measure值
Table 1. Average Precision Ratio,average Recall Ratio and F-Measure obtained with six algorithms
算法 P R F-Measure IT 0.438 5 0.246 7 0.371 8 GB 0.524 7 0.642 8 0.547 9 CA 0.526 8 0.695 1 0.558 0 FT 0.586 9 0.684 7 0.606 2 RC 0.759 6 0.874 8 0.783 4 OURS 0.872 3 0.804 7 0.855 7  下载: 导出CSV
下载: 导出CSV
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] -

 下载:
下载:



计量
- 文章访问数: 1705
- HTML全文浏览量: 524
- PDF下载量: 823
- 被引次数: 0
